航空航天和国防,应用笔记,自定义工程运动系统,数据存储,电子,龙头,万向节和光学贴装,激光扫描头,激光系统,医疗器械制造,运动控制平台,电机,精密制造,工艺专用产品,科学亚博微信vip群和研究机构,半导体,阶段和执行器,测试和检查
应用笔记
Aerotech的Easytune Advanced Autoduning工具
当用户发现运动控制应用的准确性很低时,例如由于摩擦,低频干扰等导致的误差不可接受,亚博微信vip群它们通常首先提高伺服环路以减少以下错误。不幸的是,这种“快速修复”可能导致多余的增益,使系统不稳定。
通常,自动调谐工具没有完全优化系统性能,因为它们通常可以增加或减少伺服环路,但不能自动将过滤器自动应用于谐振频率以确保系统稳定并最大化带宽。因此,控制工程师使用Bode Plots来分析系统性能和稳定性,并减少以下错误 - 这导致我们的第二个难题。为了分析系统来解决稳定性问题,控制工程师需要具有实质性的控制理论和控制系统体验。通常,设备制造商将有控制工程师在装运前可以在工厂调整系统的工作人员。然而,在运输机器后,服务工程师可能接管,可能面临实质的调整问题,但没有长期控制工程师的丰富经验。这是easytune®可以提供帮助的地方。
Easytune包括以下功能:(1)自动调整伺服环路增益,(2)自动调整伺服过滤器和(3)自动分析系统稳定性。Easytune将经验丰富的控制工程师掌握在指尖。它广泛地精制在许多不同的运动系统上,包括轴承不同的轴承,驱动技术和机械配置。要获得所有这些功能的好处,用户只需按一个按钮即可。EasyTune然后自动分析系统,将相同的补救措施应用于经验丰富的控制工程师,并在几分钟内完成任务。
例子
该示例中的运动参数如下。
中风:50毫米
速度:500 mm / s
加速:9800 mm / s2
在位置距离:±5μm
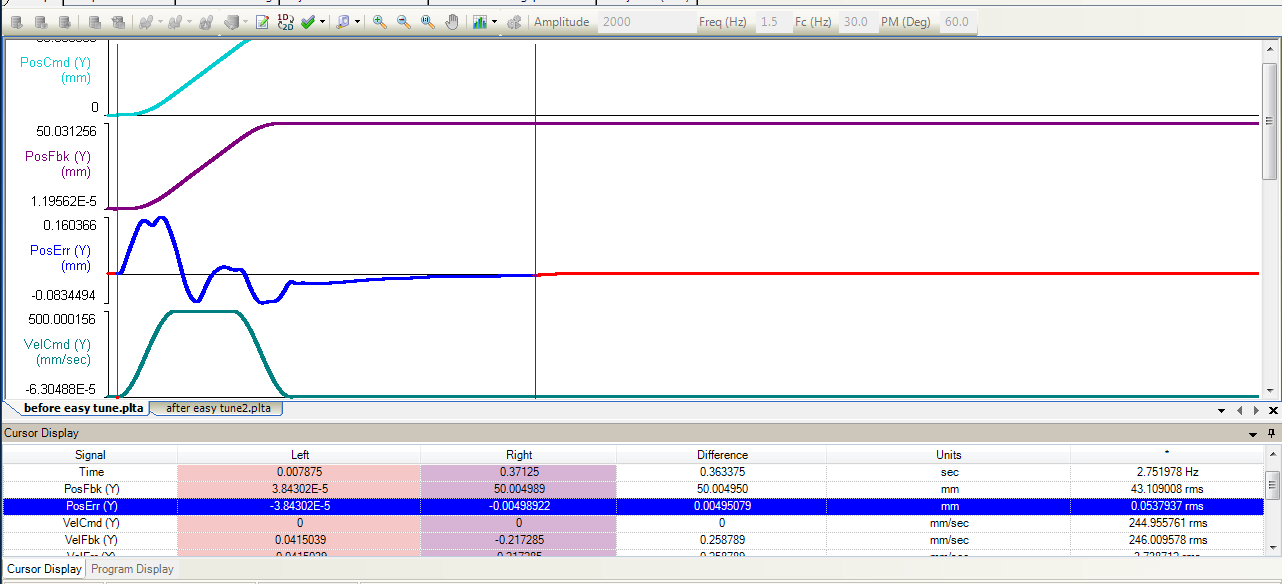
在使用Easytune工具之前,移动时间为153ms,稳定时间为210毫秒,总移动和稳定时间为363毫秒。图1中的红线表明,位阈值为5μm。
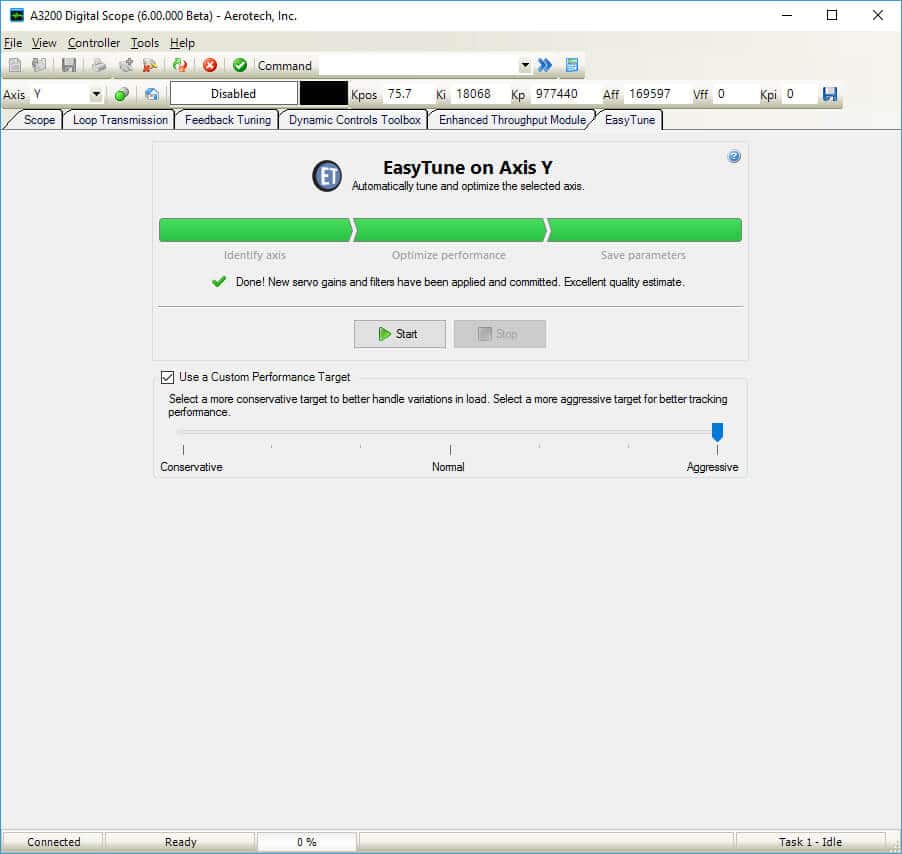
现在是时候适用easytune。首先,如图3所示,用户选择性能目标:攻击性,正常或保守。我们将应用攻击性能目标。
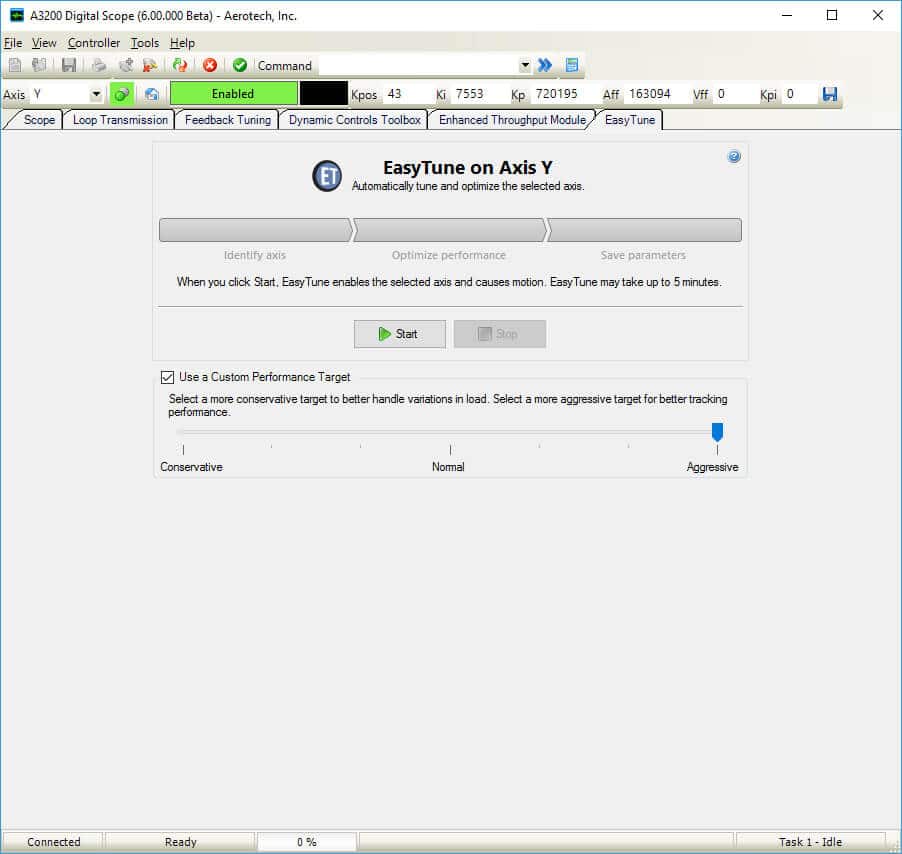
在Easytune提示之后(图4和5),我们设置了行程距离和速度,识别我们控制器上的轴,然后按“开始”按钮。
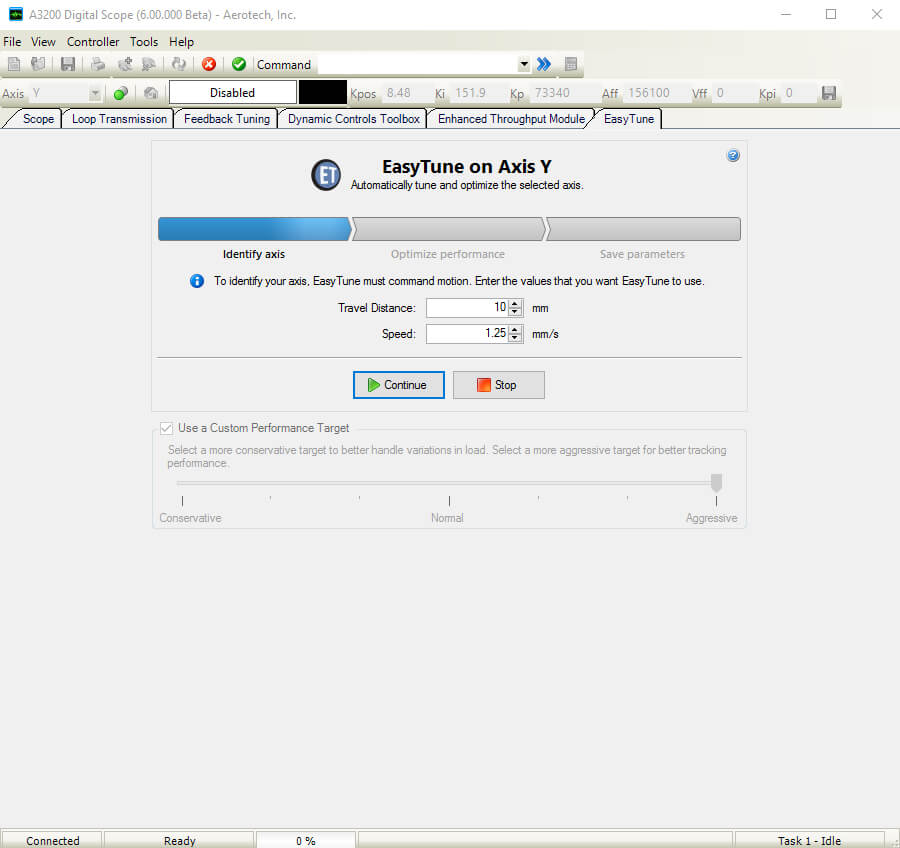
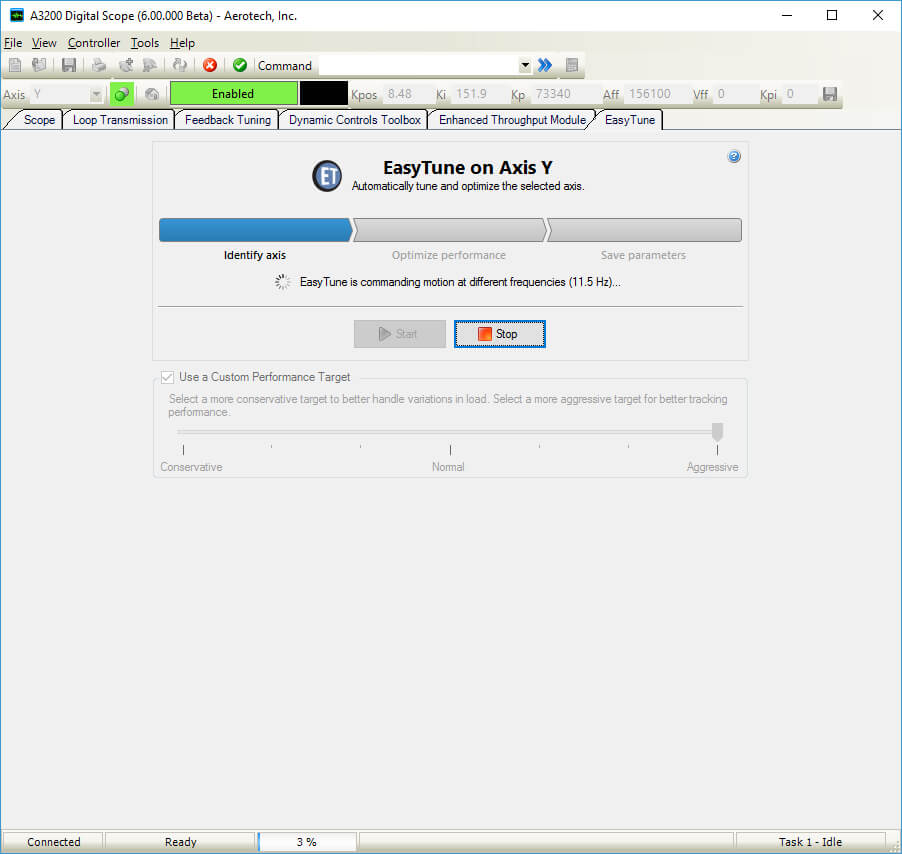
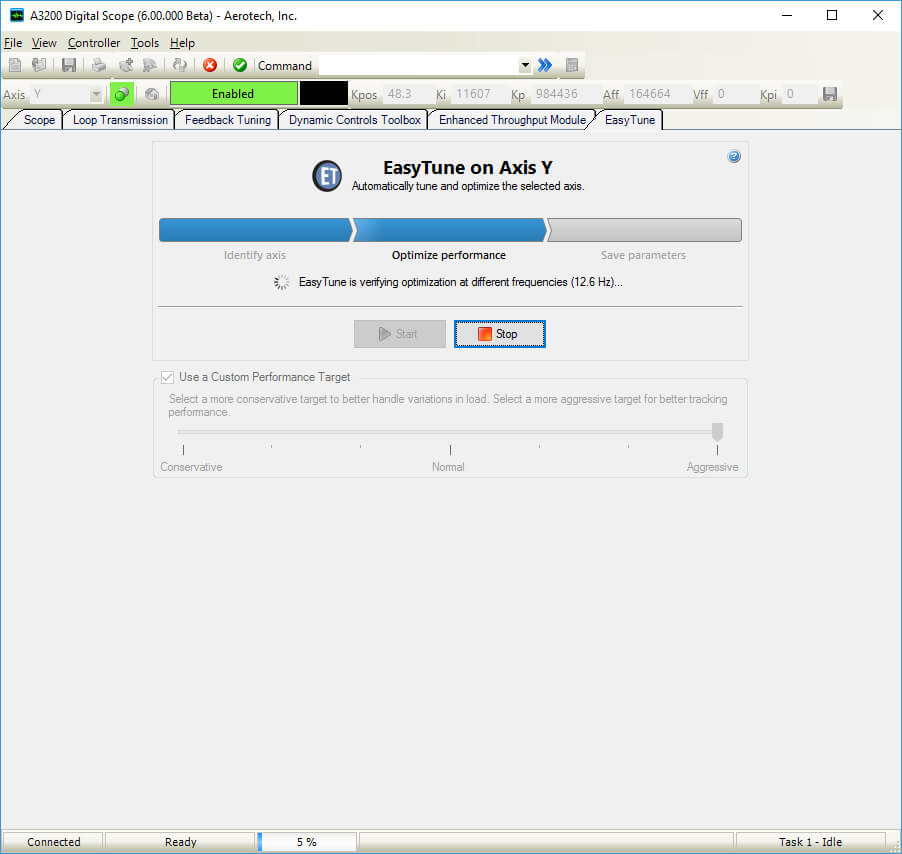
然后,EasyTune通过在不同频率下优化优化性能(图6和7)开始优化性能(图6和7)。当完成时,控制器会保存新的伺服环路增益和过滤参数。
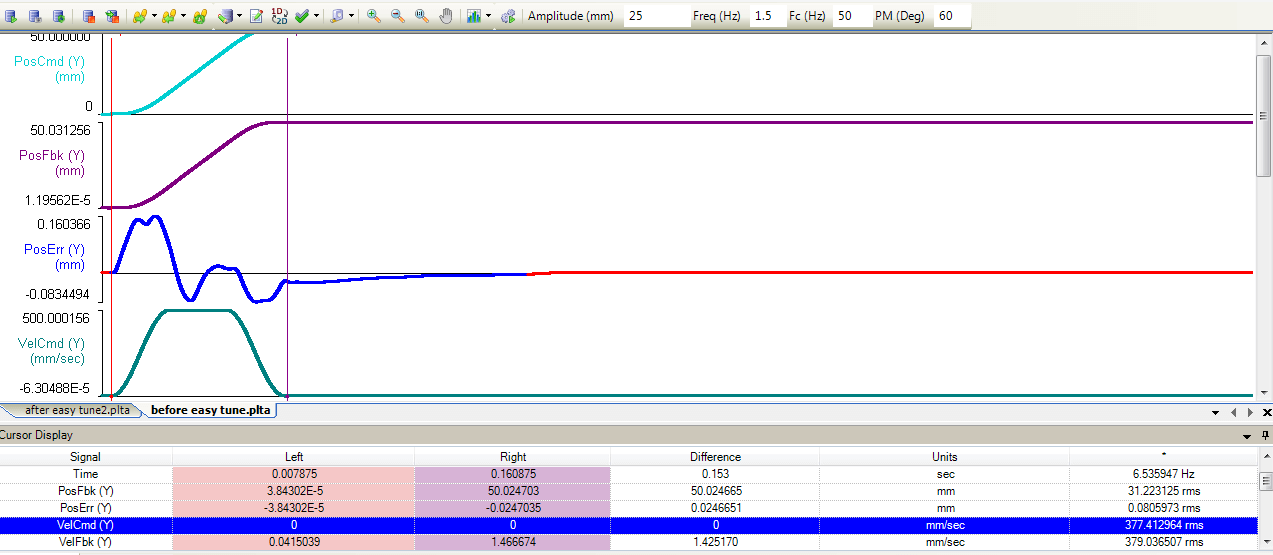
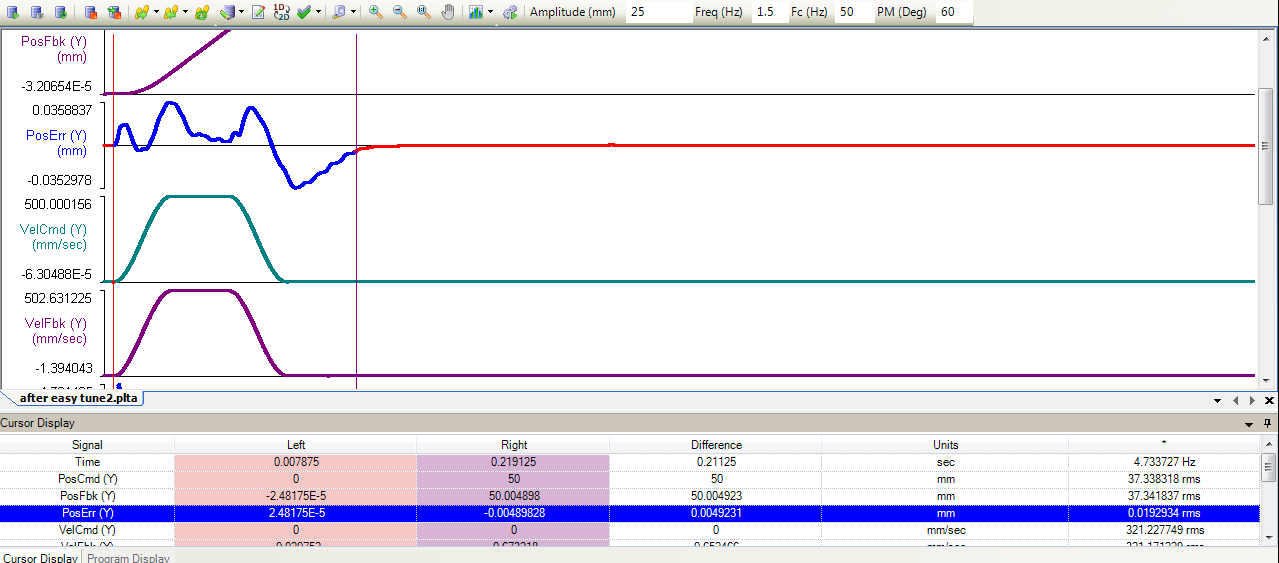
使用EasyTune后,我们然后运行相同的运动参数。现在已经从210毫秒到58毫秒减少了安顿的时间(图8)。移动和稳定时间是211毫秒。
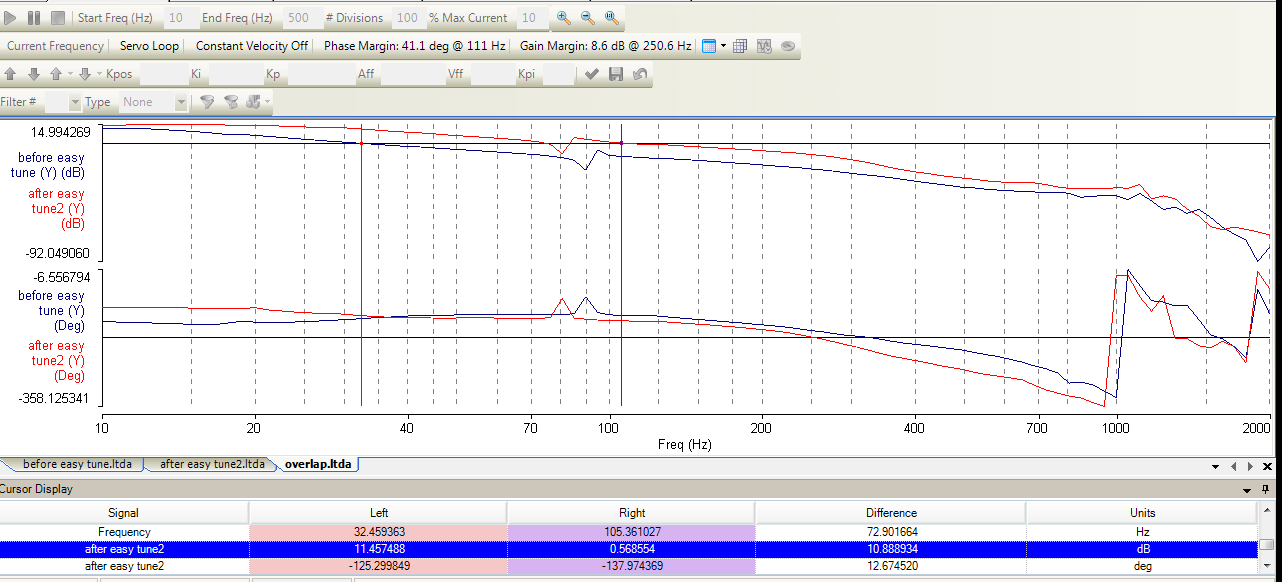
Easytune如何工作?让我们重叠两个环路传输图。看着地图,我们发现交叉频率从32 Hz增加到105 Hz。由于带宽增加,因此减少了以下错误。
结论
Easytune在不同的运动系统上进行了广泛测试和精炼。此工具可以减少稳定,以增强您的机器的吞吐量。它允许非控制系统用户快速且轻松地完成系统调整。