采购产品集成自动化系统,激光扫描头,激光系统,医疗设备制造,特定工艺产品,舞台和驱动器,白皮书
白皮书
利用CADFusion和PSO位图工具对圆柱形工件进行激光光栅扫描
斯科特施密特
应用程序集团经理
大量圆柱激光加工应用程序编程激光写入活动,仿佛两个轴(一个线性和一个旋转)都是既有线性,本质上的线性。换句话说,圆柱形图案“展开”以使形状更典型的扁平工件。虽然该技术可以缓解运动控制编程负担,但是由于在激光加工期间必须经历旋转轴亚博微信vip群(特别是)的许多方向改变,所得到的图案周期时间遭受。或者,“自由运行”沿恒定方向和光栅扫描所需图案的“自由运行”是更好的,更效效地将相同的图案写入圆柱形工件。
图1显示了典型的展开支架图案。由于图案中的许多紧密圆形特征,两个轴必须在执行运动简档时完成许多定向改变。由于工件的直径越来越小,这些定向变化所暗示的加速度值变得非常高。在某些加速度下,阶段可以不再有效地跟踪所需的轮廓,并且必须增加循环时间(随着加速度值降低)以补偿。
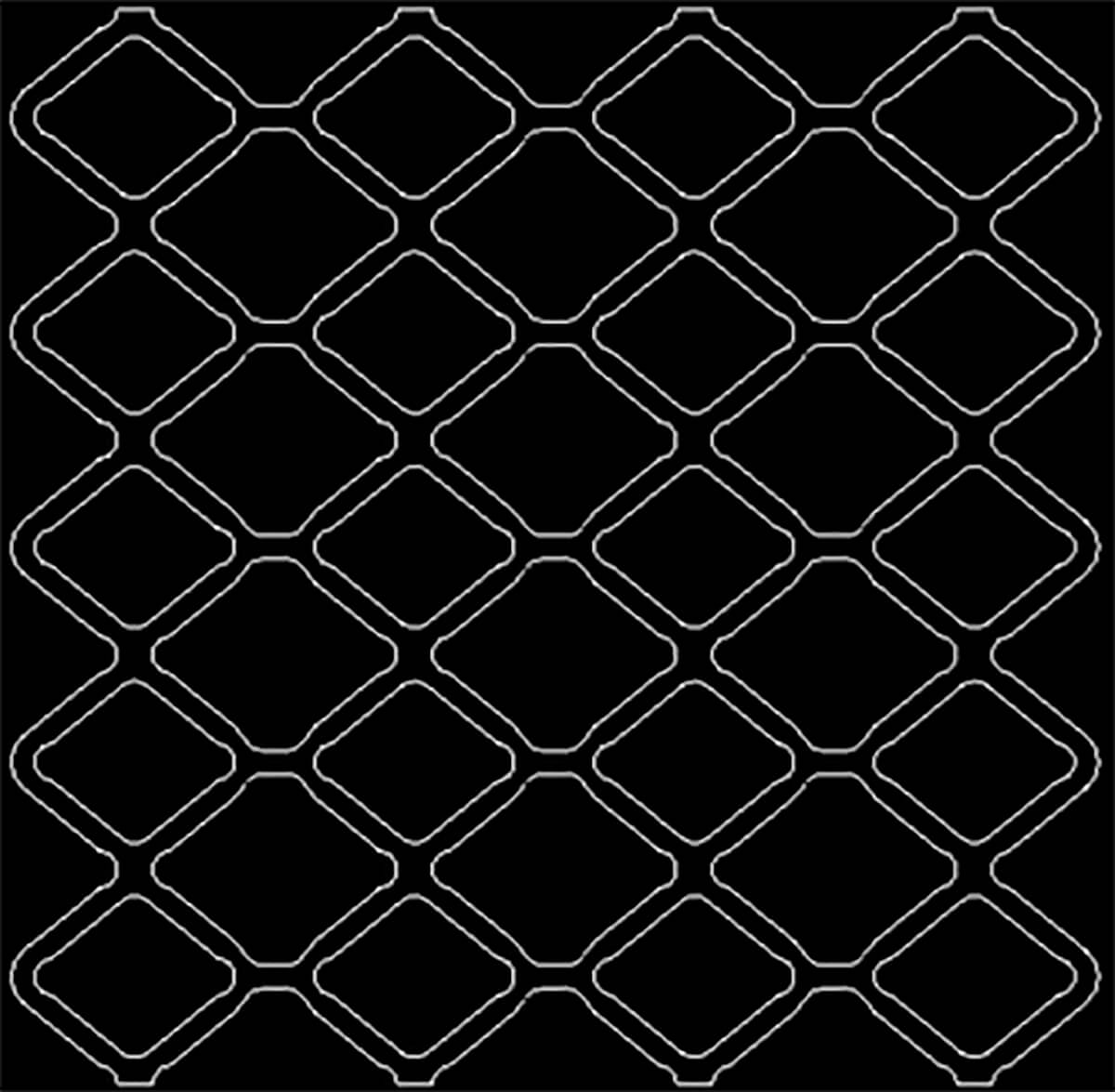
但是,如果对图1中所示的图像进行采样以创建大小的像素,其大小是激光光斑大小的整数倍数,则可以使用从所产生的位图阵列中使用光栅样式轻松编写整个模式。此外,CADFUSECT和PSOoutput位图和原始的标记特征原产于Aerotech自动3200 (A3200)控制器可以促进使用高速电压计(Aerotech's的连续旋转工件上的图案Nmark AGV.生产线)。AGV的一个轴执行线性扫描,而第二轴补偿在单个光栅线期间工件的旋转 - 即,确保该线路在工件上不是对角线。当然,必须注意选择一种转速和扫描速度,不会导致激光点“走出去”工件并变得散声。
创建此类项目所需的步骤跟随。
从绘图创建位图
首先,将源DXF文件保存到最高可能分辨率的位图格式。确保将像素大小缩放或选择为用于处理该部件的激光点的整数倍数。其他采样策略可能包括简单的剪辑/屏幕捕获(用于较低的分辨率试验)或将载体文件转换为位图图像的第三方程序。
使用cadfusion来创建位图项目
接下来,打开Cadfusion并开始一个新项目。第一关键步骤是将位图对象导入画布上。这是通过从Cadfusion中的Create组中选择Bitmap项来完成的。结果对话框如图2所示。
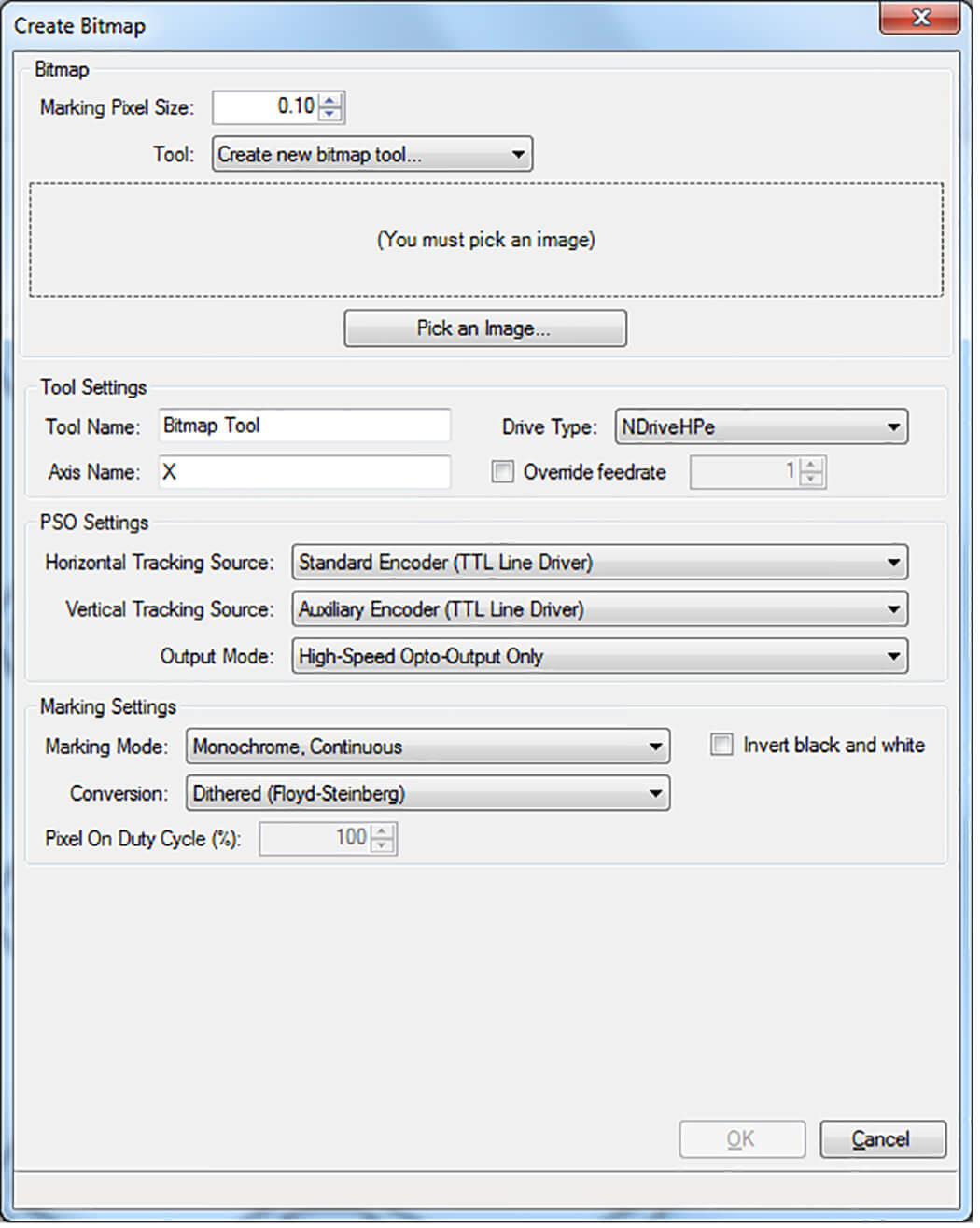
应选择所需的位图图像(使用“选择图像...”按钮),并且应选择位图工具设置。CADFUSUTION允许轻松选择驱动硬件,该硬件简化了跟踪源(从伺服编码器信号的每个轴的位置)以及标记设置。对于我们的示例,我们将检查“反转黑白”框(因为我们的位图在黑色背景画布上捕获),我们将从转换下拉列表中选择“阈值,位图的平均像素值”选项。此外,我们将保持默认的驱动器类型和PSO设置,我们还将承认第一轴 - 也将发出PSO脉冲到激光器 - 在A3200控制器参数文件中命名为x。
完成位图设置后,CADfusion允许用户选择将实际位图对象放在其画布上的位置。我们将手动键入“0,0”以将位图的左下角放在Cadfusion的画布的起源。请注意,在放置位图后,已创建位图工具,并在CADFusion窗口的左侧的项目树下可见。
接下来,我们必须在位图对象和工具中定义标记像素大小。单击画布上的位图映像或项目树上的位图映像暴露在CADfusion窗口的右侧的属性(图3)。
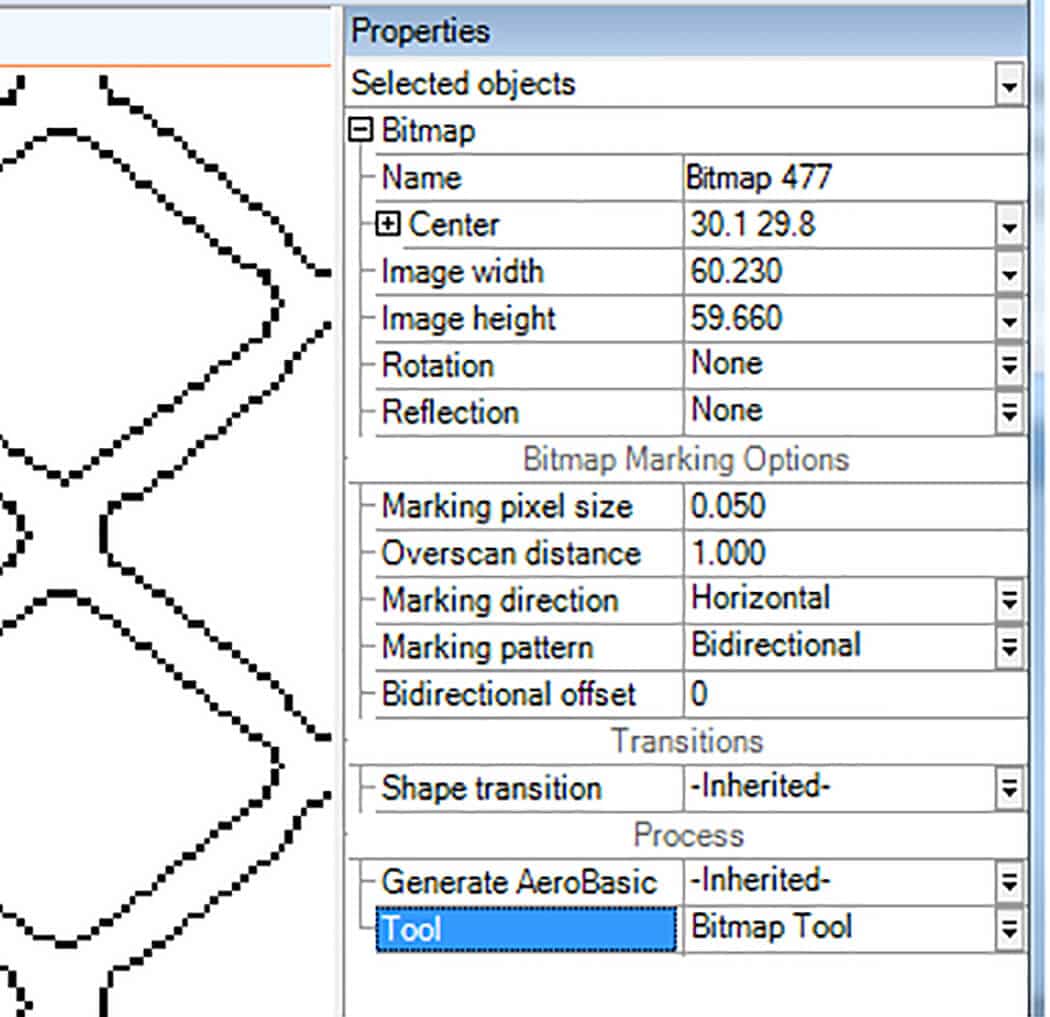
在属性面板中,我们选择标记像素大小为0.050,这对应于我们打算在A3200内使用的配置文件50微米(并且是将使用的激光和光学设置的光斑尺寸)。换句话说,A3200参数文件中的用户单元是一毫米。
CADFusion内的最后一步是导出实际的A3200代码。从“文件”菜单组中选择“导出”。这会启动项目设置对话框如果尚未设置这些对话框(图4)。
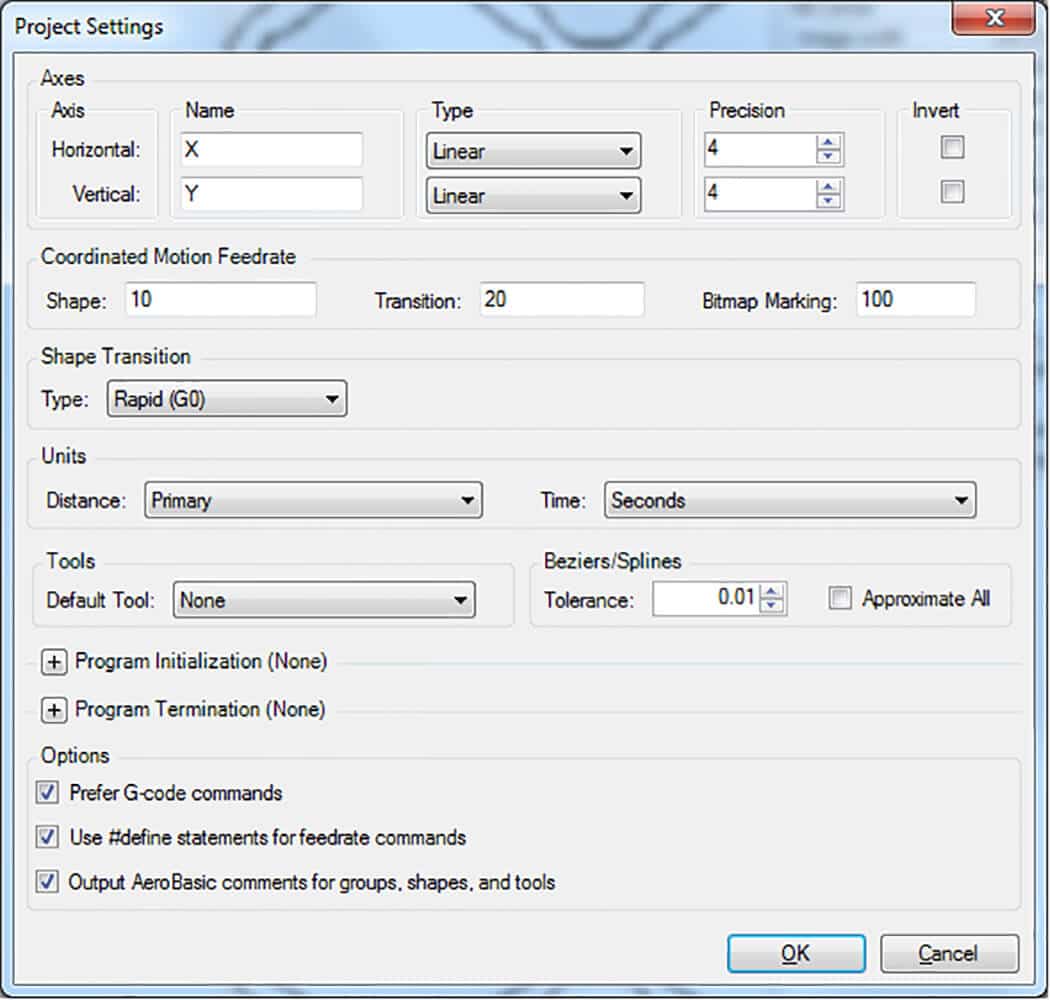
这些设置应该支持系统机制允许的进给量。对于电流标记,坐标运动进给速率可以设置得相当高——很容易设置为100毫米/秒或更高。轴名应该根据控制器参数文件进行验证,并且应该为两个轴选择线性类型(回想一下,在这个项目中,旋转平台被编程为一个圆周单元的线性轴)。如果需要任何初始化或终止代码(例如,启用和放置轴,设置机器安全或I/O功能,或进行函数声明和定义),则可以在此对话框中输入或导入这些代码。
选择并保存了项目设置后,将显示生成的代码,应保存并保存。
在飞行中配置标记
接下来,打开已保存的程序A3200 Motion Composer.。使马克连续旋转激光加工所需的动态特性,需要以下命令允许径向检流计轴Y方向(在我们的示例中)获得旋转舞台的编码器反馈(和在方向上扫描然后补偿):
Galvo EncodersCalefactor Y(Countsperunit.y /
countsperunit.theta)* emulatedquadraturedider.theta
在该示例中,旋转轴被命名为THETA。该陈述不仅将THA绑定到Y GALVO轴方向,而且还缩放相对轴,使得GALVO方向上的一个用户单元等同于伺服(θ)方向上的相同用户单元。
此语句中的EmulatedQuadraturedivider限定符是可选的,如果该返回范围参数设置为1在配置文件中,则可以省略。在“位图1”行注释之前,应将此语句插入程序中,以确定它在系统的任何动作之前实现。
此时还应确认系统的特定布线确认,从旋转级驱动器的编码器反馈信号正确地输入到Galvo驱动器的Auxio端口中。
来自A3200帮助文件
连接编码器反馈电缆
使用正确的电缆连接伺服驱动器的输出到电源驱动的辅助输入(Nmark)。
| 伺服驱动器类型 | 电缆部件号 |
| NPAQ. | C23320-10 |
| ndrive. | C23161-xx |
配置参数和命令并将伺服驱动器连接到NMark后,在尝试在IFOV模式下运行程序之前验证配置。
- 开放运动作曲家。
- 打开状态实用程序,然后单击“诊断”选项卡。
- 启用伺服轴。
- 在Motion Composer中,jog伺服轴并在Status Utility中查看Nmark轴上的Aux Pos Fdbk信号。
- 验证AUX POS FDBK是否与伺服轴相同的方向计数。
一种。如果计数器未更改,则配置或接线存在问题。
湾如果计数器以相反的方向计数作为伺服轴的POS FDBK,则倒置布线极性。
配置此功能的最后一步是命令旋转级到Freerun。通常,这将在伽迹运动被命令编写实际部分之前立即完成。但是,CADfusion输出非常紧凑的代码结构,用于位图生成,该代码生成嵌套在下载位图阵列以驱动存储器的那些命令中嵌套运动命令。因此,FreeRun命令所需的插入点可能不是显而易见的。这个命令:
FREERUNθ<进料速度>
应立即在CADFusion生成的代码中立即插入:
$ nextreadscan = $ nextreadscan + $ maxscansperread
同样,命令:
Freeerun Theta停止
应该在命令行后插入程序的末尾:
fileclose $ bitmapdatfile.
在激光加工完成后停止旋转轴。
要考虑的一个关键因素是为旋转级选择的进给速率。如果加料速度太慢或太快,检流计轴的径向(同样,Y在我们的示例中)仍将追踪旋转阶段的运动,但它可能导致激光点“脱落”一边或另一边的圆柱形工件的痕迹。
对于第一阶近似,可以估计总处理时间作为光栅扫描的数量 - 即图像长度除以像素大小 - 扫描速度(协调运动进给)和图像宽度的乘数:
处理时间=(图像长度/像素大小)*(协调运动进给率)*(图像宽度)
当然这假设轴向(x)中的镀锌轴可以在接近零时间内加速。所有尺寸都处于用户单元中,并且协调的运动进给率应替换为程序中该轴使用的任何明确命令的速率值。应选择FreeRun命令的进料以在此时间内支持旋转轴的一个旋转。
总结
前面的示例和支持代码演示了A3200唯一的特征,以及由CADFUSUS的强大图像后处理能力增强的特征。