应用笔记,定制工程运动系统,运动控制平台,电机,精密制造,阶段和执行器亚博微信vip群
应用笔记
在包装行业的线路跟随
复杂的控制能力和伺服电机是在包装应用后替换典型线路中的步进电机的下一个逻辑进步。
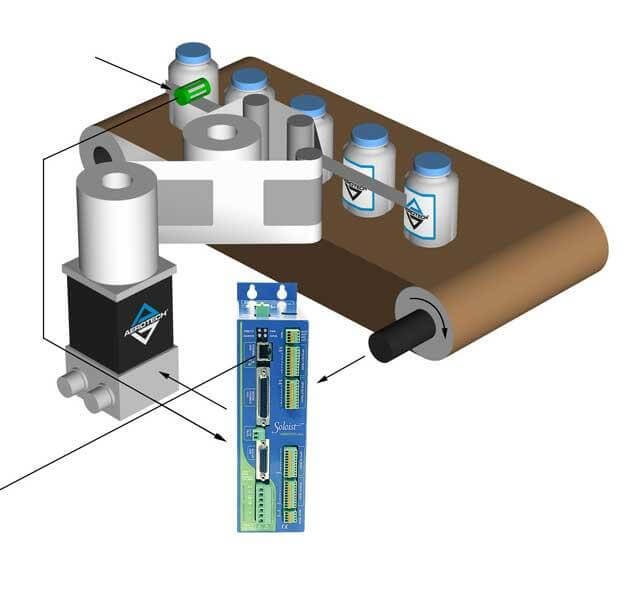
包装行业内的应用包括许多型号,包括标签,切割到长度,飞切,车道转移,旋转刀等。所有这些行之后的应用程序都有相同的机器功能在其核心。通常,有一个独立的移动线路,反馈测量线速度。该反馈信号通过辅助编码器输入输入到运动控制器。亚博微信vip群然后,运亚博微信vip群动控制器使用该辅助编码器输入为命令速度,而它控制一个称为“从”或“跟随器”轴的另一轴以与线相同的速度移动。线速度和跟随器速度之间的关系可以是一对一的比例或其他功能。
除了匹配的线速外,线上的特定点(或位置)必须与跟随器轴同步。用某种类型的传感器(光眼,称量站等)测量线上的物体位置,触发用于注册的高速输入。在此事件时,捕获线的位置。知道登记的位置和事件传感器之间的距离和被控制的轴,控制器计算轨迹以将以下轴的位置与线上的位置匹配。简单地,控制器必须坐标速度和轴的位置,它基于速度和事件传感器使用独立线路控制。
行业需求
目前,大多数行跟随机器使用步进电机。但是,需要更加分辨率,更多的智能,下载数据的能力,更好的HMIS和更多故障信息驱动需要更复杂的控制和伺服电机。此外,驱动步进和伺服电动机所需的软件和控制的不同差异倾向于强制机器制造商在机器的各个部件中使用不同的部件。
这些包装机必须操作的速度对于吞吐量和成本至关重要。例如,标签放置应用中的典型精度约为1/32英寸的1/32,典型的线路速度为2000至3000英寸/分钟。这意味着需要高速IO和全功能运动轨迹来控制包装过程。此外,一些较旧的机器具有PLC和运动驱动器。这增加了升级到新软件和硬件时的复杂性和时间。
Aerotech功能和优点

Aerotech为包装行业提供强大的软件和灵活的驱动器和电机。与这些产品编写复杂程序的能力使它们能够在当今苛刻的应用程序中融合。
驱动多个电机技术
Aerotech驱动产品提供了在不改变软件或硬件的情况下驾驶步进和伺服电机的能力。这意味着在仅改变参数之后,一块驱动器硬件将在同一平台上控制船长和伺服电机。此外,使用相同的驱动器和软件的优点意味着从跨步者切换到伺服系统的成本减少。
高速IO.
Aerotech驱动器提供高速IO。这包括高速输入和输出。驱动器还能够根据许多不同的输入计算全功能协调运动轨迹,并且可用于驱动快速和复杂的进程。驱动器有两个高速输入,典型延迟为50纳秒。高速输出,PSO信号,是一个位置相关的可编程输出,单轴跟踪延迟为160纳秒。
辅助编码器
Aerotech驱动器包含辅助编码器输入。该辅助编码器可用于高精度应用中的双环控制,以将主编码器从主编码器转换为外部源,或者在应用程序之后,它可用于将外部编码器信号带入驱动器以进行跟踪。该输入可以以10 MHz的速率接受四QUAD B信号。
PLC动作
Aerotech产品可用作PLC和运动驱动器组件,以消除复杂性,最大限度地减少编程和集成成本,并提高组件之间的功能。
数据处理
Aerotech驱动器提供了与RFID读取器的链接,将数据存储到网络的能力,并通过实现以太网/ IP™总线对实时信息进行反应。
以太网/ IP™
Aerotech驱动器支持以太网/ IP™通信总线。这允许运动控制器直接通过Alle亚博微信vip群n Bradley协议进行谈话并由RSLogix程序控制。
完全集成
Aerotech .NET库可以集成到视觉系统中,以通过高级运动功能同步vision的运动。
可定制的控制
Aerotech是一家建造在垂直整合的供应链上的公司,Aerotech Engineering涵盖了广泛的学科。这允许自定义软件和硬件的每个部分以适应应用程序的确切需求。示例包括OEM驱动器包装,用于特定形式因素,定制软件和库和自定义电机设计。
编程概念
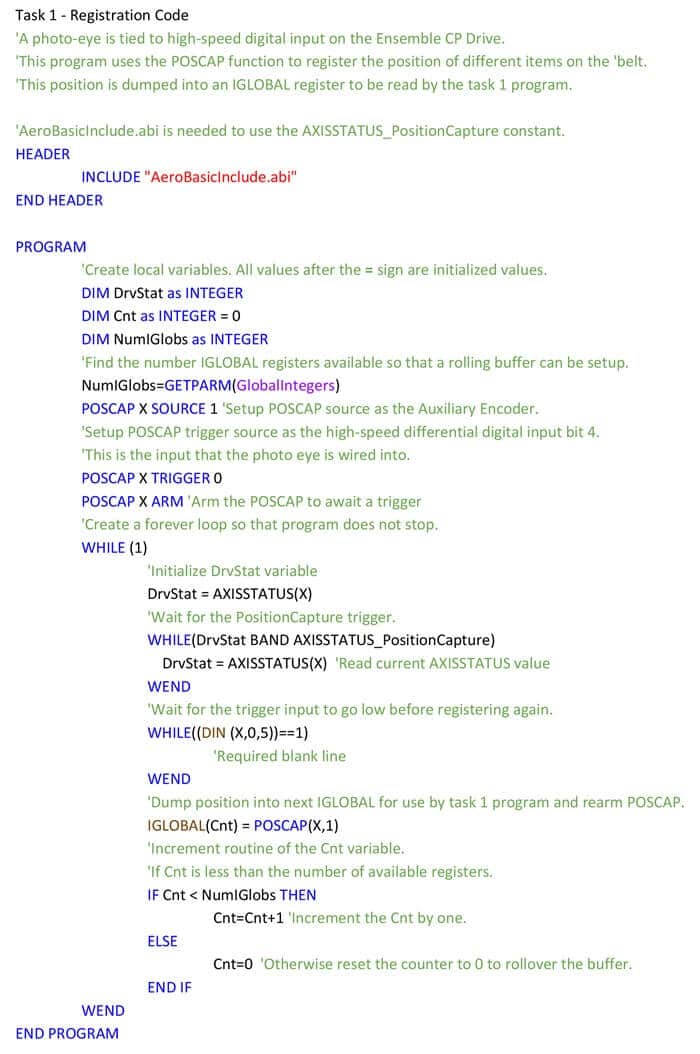
Aerotech控制器包含多个任务。这些任务可用于确保可以在线上注册多个产品,并且单独发生运动。在以下示例中,我们使用两个任务合奏。任务1用于运动,任务3用于输入注册。我们使用iglobal寄存器通过任务之间的信息。
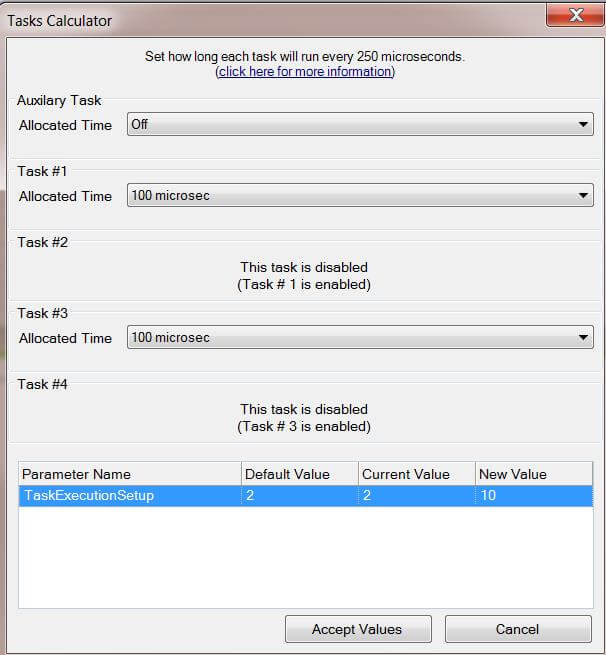
合奏任务计算器用于将周期时间分配给任务。有五个任务切片,其中四个由任务1到4使用。第五任务包含一个运行一次毫秒的各种进程,包括辅助任务。
要运行多个程序,我们需要设置任务。为每个任务使用相同的时间切片使用任务1和任务3,这将允许每个任务的100μs时间切片。要为另一个任务提供更高的优先级,可以选择不同的任务。在此演示中,我们为代码执行提供了相同优先级的任务。
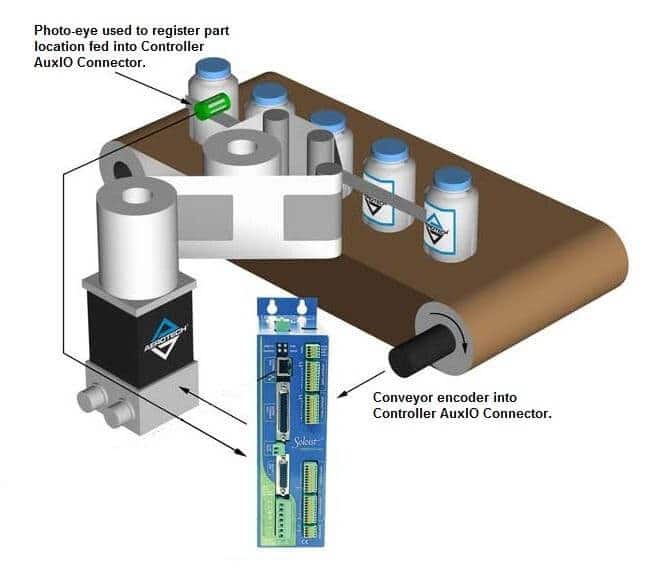
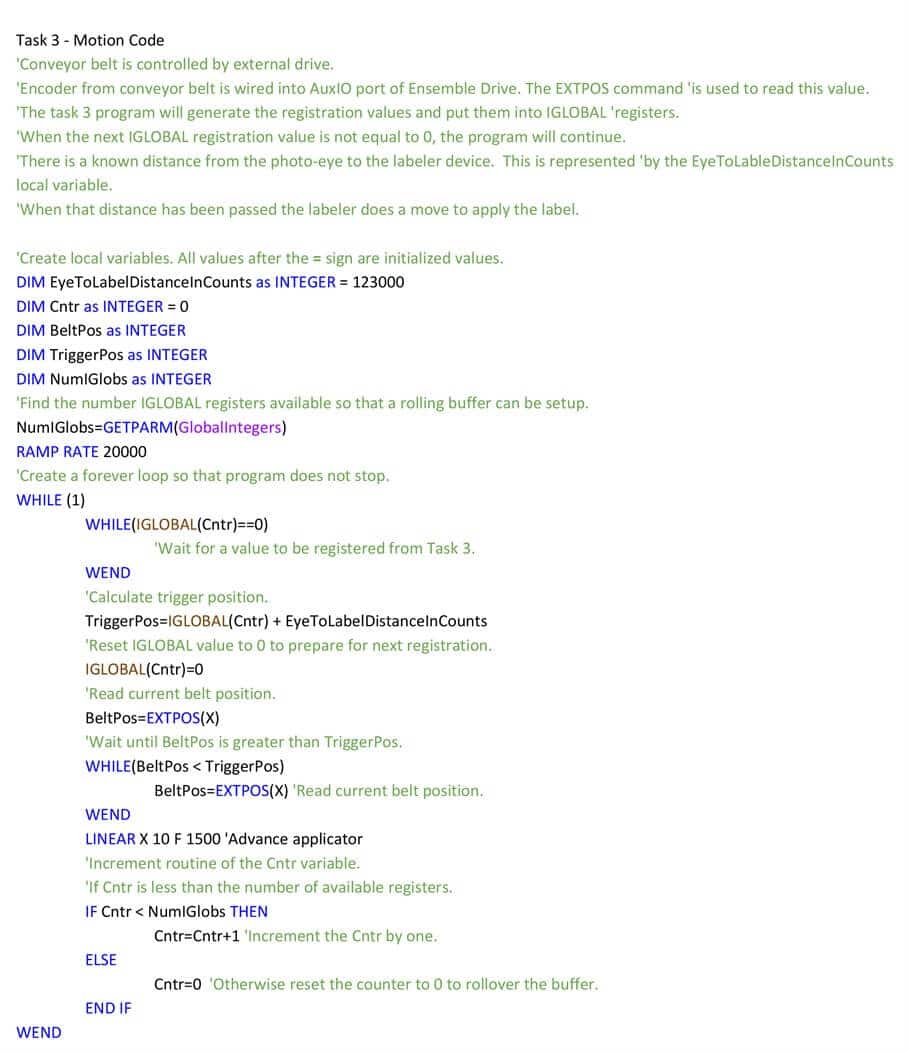
以下编程代码将显示一个应用程序,该应用程序将执行在瓶子上放置标签的所需步骤。光眼在合并CP驱动器上连接到高速输入。通过POSCAP函数在硬件级别扫描此输入。POSCAP功能用于注册带的位置。从输入的触发器延迟延迟400 ns的延迟。
从光眼到标签的距离是已知的固定距离。使用POSCAP函数记录的值,程序将完全了解何时旋转电机将标签放在瓶子上。
结果
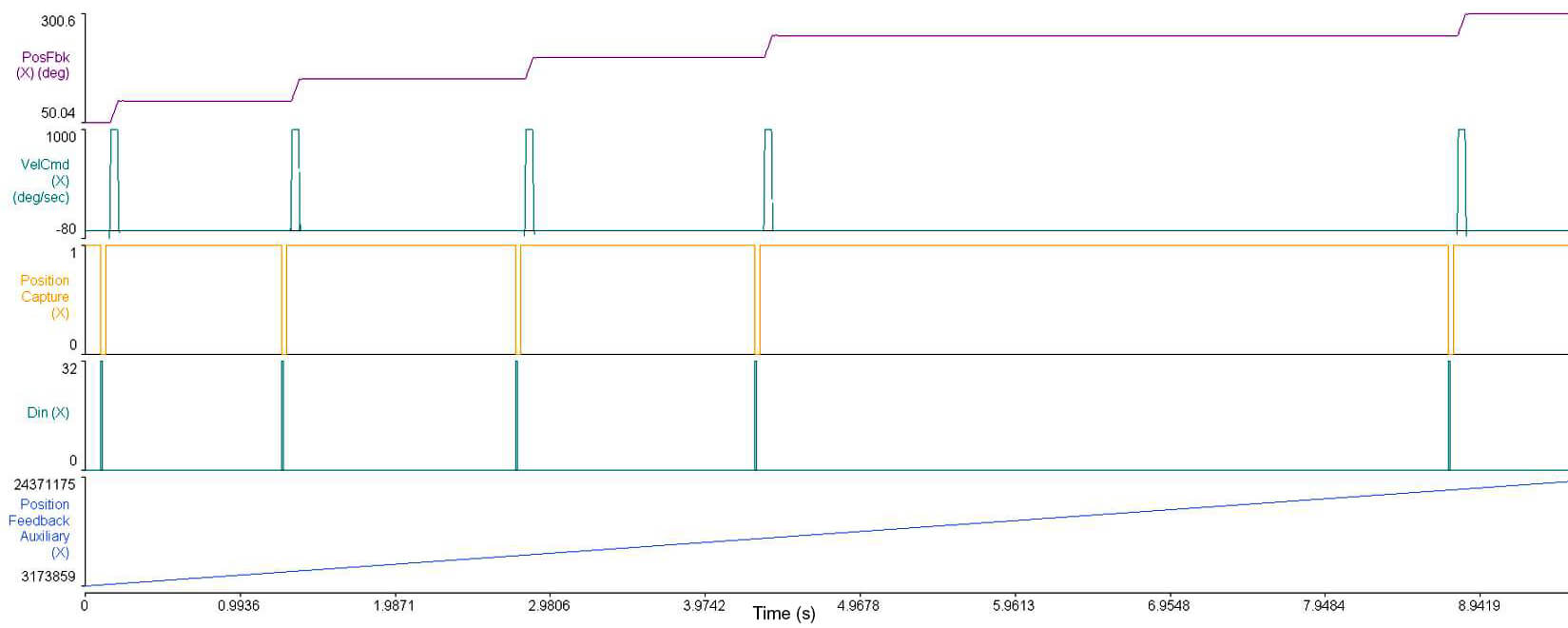
在上述视图中触发了五个部分。触发时位置捕获位将变为0。当ARMED它转到1.可以看出,触发器之间有不同的距离。在第一次达到标签机制之前,我们可以有多次触发器。这很好,因为程序仍然能够录制所有值并保持部分之间的正确距离,只要动作可以在下一个部分到达窗口之前完成。这种应用时间是皮带可以移动的速度或皮带上的单位的速度有多大的限制因素。
我们在显示顶部到底部的顺序捕获,位置反馈,速度指令,集合中状态字的位置捕获位,数字输入触发位置捕获位和来自皮带的编码器。
由于机动仪运动总线具有非常高的确定性,我们可以“拨入”我们的移动位置。我们在运动代码中的EyeoLabeldIstanceIncounds变量可以有一个偏移来解释轴的运动的延迟。此延迟将是基于程序的固定值,通常根据使用的移动命令的样式约为3-5毫秒。我们可以轻松使用此时间延迟来基于线速计算自身。这将完全自动化该线路,使得最终用户可以调整速度而无需重新校准标签放置。
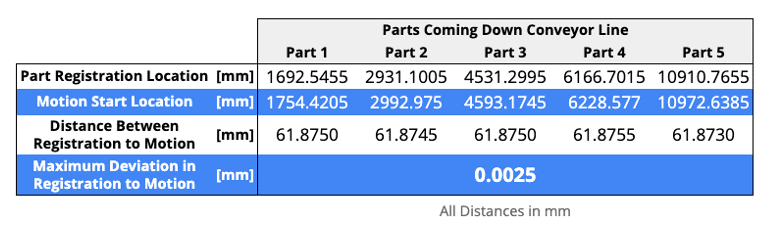
在该示例中,在辅助编码器输入上有50800个计数流。皮带以每秒42英寸或2520 IPM的速率移动。触发机制能够在751编码器中跟踪和启动运动,计数最坏情况。触发器之间的差异从目标位置的4个计数差。
我们通过试验和错误拨打这一点,我们本可以将此触发延迟带到0.即使没有这种方法,结果也非常精确。该系统测试可以在2520 IPM的线速下准确地将标签放置在0.015英寸(大约1/67英寸)所需位置的所需位置,其可重复性为0.0001英寸。