定制工程运动系统,龙门架,框架和光学支架,六脚,运动控制平台,压电纳米定位器,科学和研究机构,工作台和执行器,白皮书亚博微信vip群
白皮书
波束定位的最小增量运动和保持稳定性
布莱恩·奥康纳
产品经理
背景
许多光束应用,如x射线显微镜和计算机断层扫描(CT),需要定位样品,探测器和光学来执行测量。显微镜应用通常需要在亚微米甚至纳米水平上成像物质的结构。良好的保持稳定性,无论是短期还是长期,都是必需的,因为在测量的时间内,样品或光学器件的运动将导致图像较差。此外,在纳米量级上进行微小机械运动的能力对于样品或光学的校准和调整通常是至关重要的。
步进电机和伺服电机是光束机械定位系统中常用的两种位置控制方式。步进电机是无刷直流设备,将360度旋转分为相等的步骤。运动是由按顺序给线圈绕组的分段通电而引起的。步进电机可以保持位置通过激励线圈的一段,没有任何反馈,使它成为一个好的选择低成本,精密的应用需要保持稳定。伺服电机是典型的无刷交流设备,但与步进电机相比,最经常使用三个阶段的线圈绕组加上反馈设备,如编码器或分解器。这种反馈装置允许控制器对电机相位进行换向,并围绕电机的实际位置关闭PID伺服回路,在需要小步长和良好保持稳定性的应用中提供了显著的优势。
研究目标
本研究的目的是评估电机和反馈技术在最小增量运动(可达到的机械步长)、短期稳定性和长期稳定性方面的表现差异。短期稳定性,或位置抖动,是在感兴趣点在短时间内(本研究选择的4秒)测量的运动量。长期稳定性是在更长的时间内测量的(本研究选择60分钟)。长期稳定性测试在各阶段处于平衡状态时进行,并在移动序列之后直接进行,以复制校准样品、光学或其他设备时所呈现的典型运动和移动序列。
为了评估和隔离这些方面的性能,Aerotech设计了一个机械定位平台基于我们的ANT180-L平台这可以配备有几种不同的驱动技术,包括由步进电机驱动的12mm直径x 1 mm间距滚珠丝杠,由旋转伺服电动机和线性伺服电动机驱动的12mm直径的x 1 mm间距滚珠丝杠。所有测试的ANT180-L级中使用的轴承是具有防笼蠕变机制的交叉滚子轴承。光学编码器用于伺服电机上的位置反馈和换向。这些包括安装到电机的旋转编码器(1000LPR,1 VPP输出)和直接计量线性编码器(玻璃比例,20μm信号周期,1 VPP输出),符合运动方向。由于不同的轴承类型,摩擦,预载和制造或组装的变化,使用模块化驱动和反馈技术的使用具有模块化驱动和反馈技术的常见机械平台。
测试阶段电机和反馈配置的总结如表1所示。
| 阶段式/驱动 | 电机/反馈的描述 |
| 线性电机 | 电机:3相线性电机(BLM-142-A) 线性编码器:玻璃上的20µm信号pitch编码器;1 Vpp输出(0.3 nm插值电分辨率) |
| 滚珠丝杠和步进电机 | 滚珠丝杠:直径12mm ×间距1mm 电机:0.9°/步长双极步进电机(林P/N: 5709G-01P) 全步分辨率:2.5μm Microstepping分辨率:0.5 nm(x5000) |
| 滚珠丝杠和伺服电机(无直线编码器) | 滚珠丝杠:直径12mm ×间距1mm 电机:三相无槽交流伺服电机(BMS60) 旋转编码器:1000 CNTS / REV;1 VPP输出(0.5nm内插电气分辨率) |
| 滚珠丝杠和伺服电机(带线性编码器) | 滚珠丝杠:直径12mm ×间距1mm 电机:三相无槽交流伺服电机(BMS60) 旋转编码器:1000 CNTS / REV;1 VPP输出(0.5nm内插电气分辨率) 线性编码器:玻璃上的20µm信号pitch编码器;1 Vpp输出(0.3 nm插值电分辨率) |
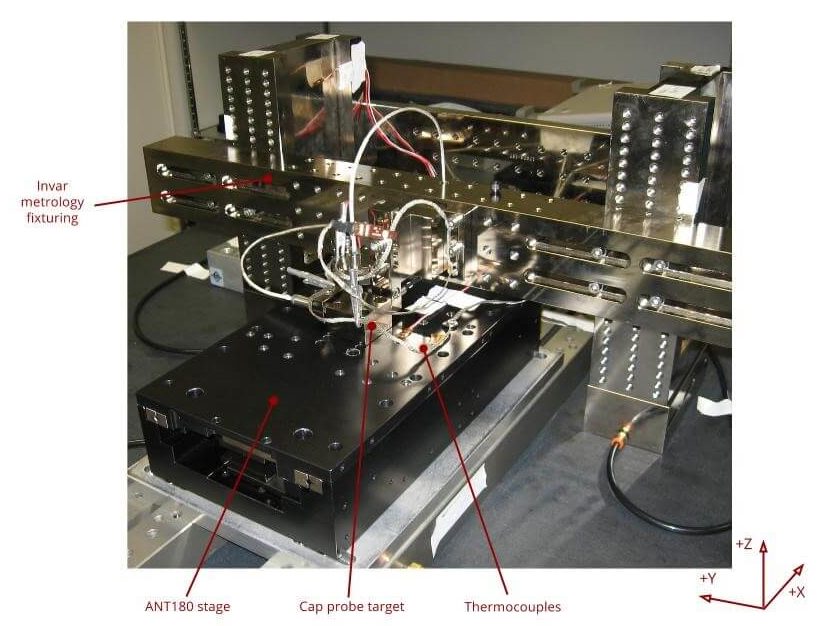
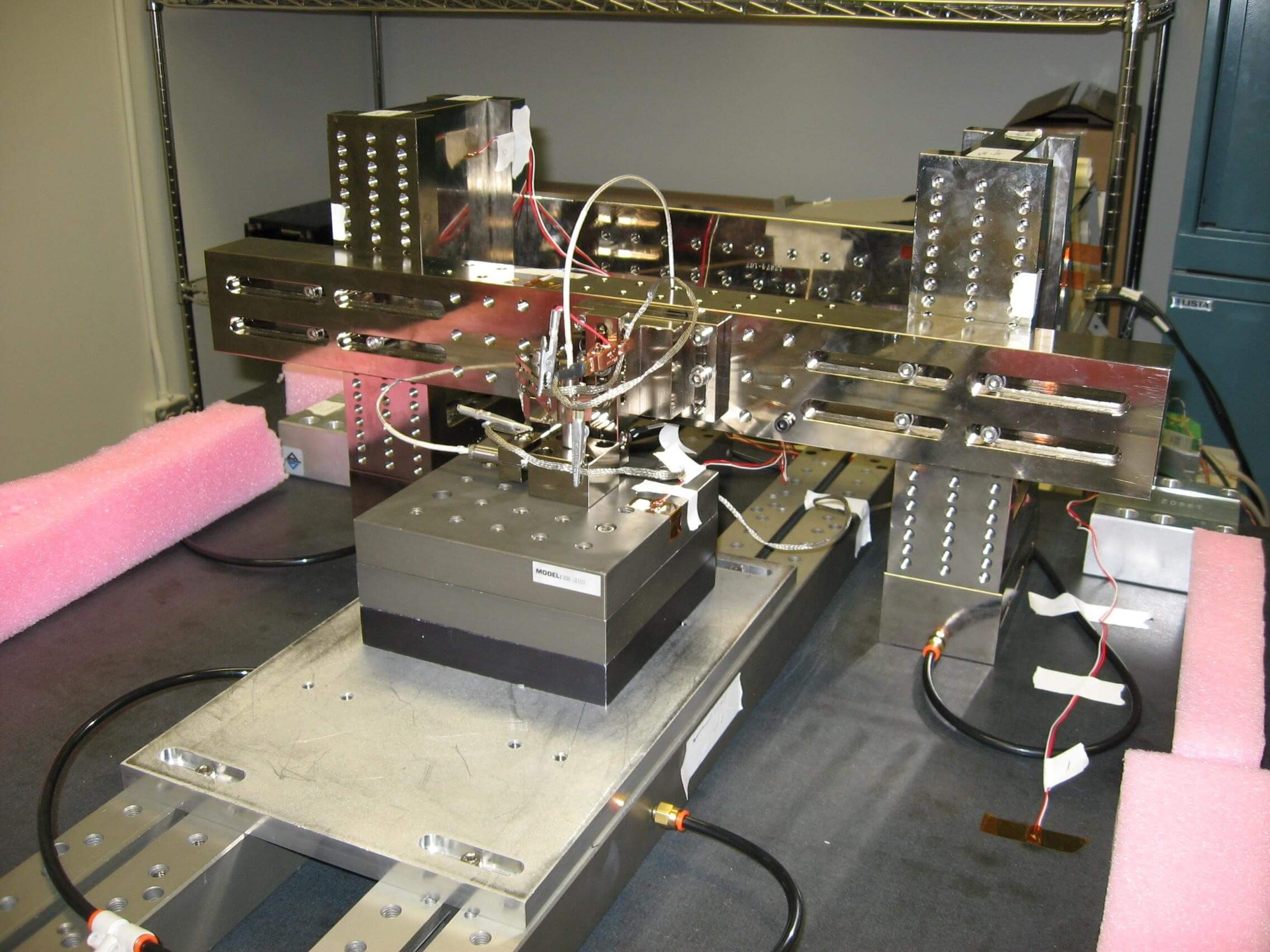
用于测试的各种阶段配置的实体模型如图1所示。

测试设置
所有测试均在Aerotech工程实验室的空气隔离花岗岩桌上进行,位于建筑物底层。ANT180-L级安装在花岗岩上的铝制真空轨道上。对于所有测试,工作点位于线性级表面上方的大约25mm。在大多数Beamline实验中,这是一个最好的情况,因为大多数偏移和阶段堆栈的长度可以是数百mm。但是,使用的测试设置使得驱动器和反馈技术的真实比较,并消除了依赖于应用的阶段堆栈布置。
计量夹具由英瓦制造,以尽量减少温度波动对计量回路的影响。此外,测试结构的设计确保结构回路刚度足够高,从而不影响位置稳定性测量。计量回路夹具的第一谐振频率约为615hz(在Y方向弯曲)。
使用狮子电容传感器捕获就位稳定性和最小增量运动测试的位置数据(驱动器P / N:CPL290,探针P / N:C9.5-5.6-2.0)和Agilent 35670A动态信号分析仪。除非另有说明,否则数据在500Hz(下方第一次计量循环结构共振下方)下滤波。热电偶用于在长期稳定性测量期间捕获空气,花岗岩,电动机和托架的温度。
所有测试都是用线性放大器进行的(Aerotech的整体对待)。选择了集合控制平台,因为这是SynchRotron应用中的典型Aerotech控制器平台。选择线性放大器,使得诸如PWM(脉冲宽度调制)开关噪声的放大器没有噪声被引入舞台或测量。
测试设置如图2所示。注意坐标系表示测试中使用的电容传感器的正方向。对于所有测试,行程方向在X方向上取向。
结果
计量回路(结构)噪音地板
在开始最小增量运动和稳定性测试之前,在所有X、Y和Z探头上测量了结构计量回路噪声,其中包括帽传感器噪声。图3显示了用一系列夹具块替换舞台的测试设置。
数据被捕获4秒,低通过滤到500 Hz的测量带宽。表2显示了从这项测量中得到的结果。
| 方向 | RMS | PK-PK. |
| X | 0.14纳米 | 1.11纳米 |
| y | 0.16 nm. | 1.10 nm. |
| Z. | 0.18纳米 | 1.45 nm. |
振动噪声地板
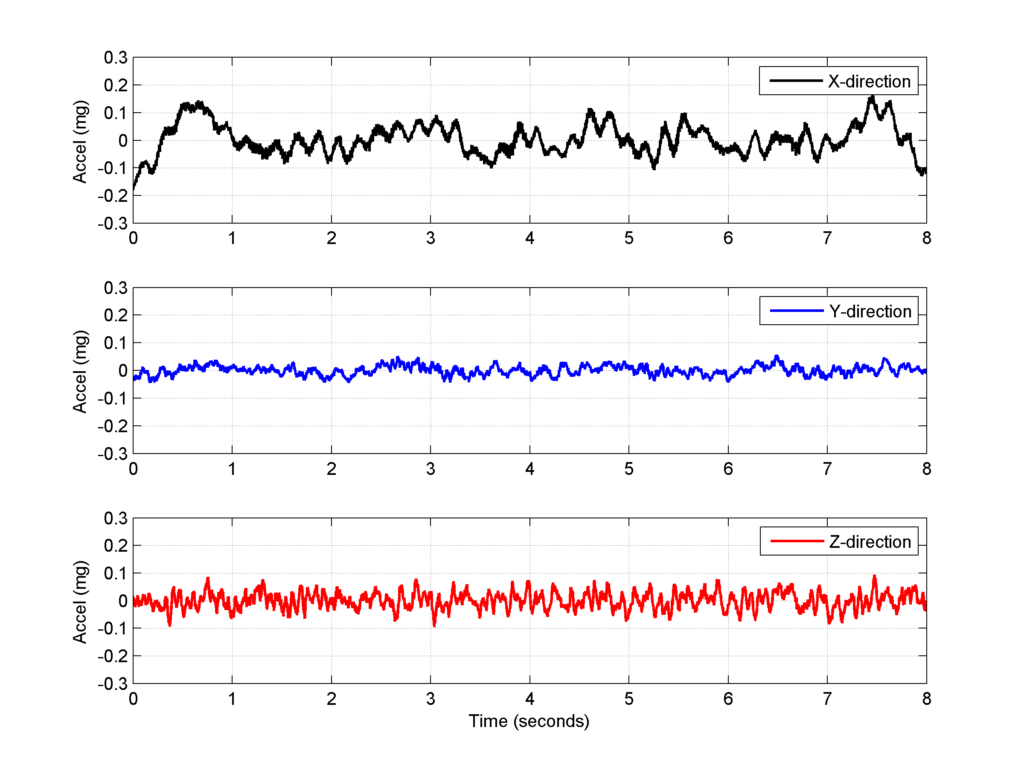
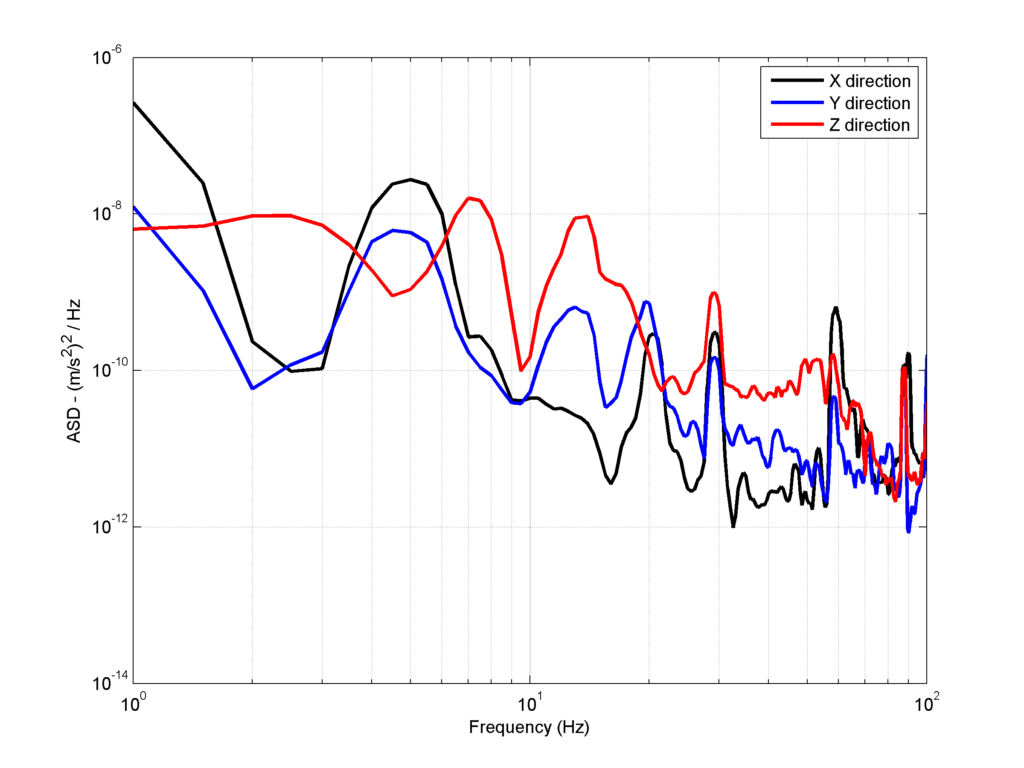
所有测试均在空气隔离的花岗岩桌子上进行。除了测量计量环噪声底板之外,在测量之前测量振动噪声底板,以定量花岗岩表面上的振动水平。图4示出了在X,Y和Z方向上的花岗岩上测量的加速时间数据,图5示出了每个方向的所得到的加速频谱密度。
最小增量运动测试
阶段配置和最小增量运动测试结果如表3所示。在阶段的基本分辨率下开始的每次测试和命令的步长增加,直到阶段能够可靠地执行10个向前和10个反向步骤并且具有合理的准确性。
| 舞台类型和驱动器 | 线性编码器分辨率 | 旋转编码器分辨率 | 实测最小增量运动 | 数字数字 |
| 线性电机 | 0.3 nm. | N/A | 1.5 nm. | 6. |
| 滚珠丝杠和伺服电机(无直线编码器) | N/A | 0.5 nm. | 50 nm. | 7. |
| 滚珠丝杠和伺服电机(带线性编码器) | 0.3 nm. | 0.5 nm. | 1.5 nm. | 8. |
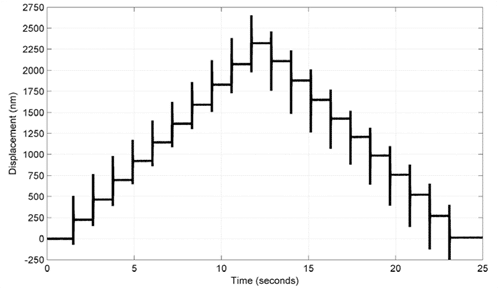
| 滚珠丝杠和步进电机 | N/A | 0.5 nm * | 250 nm. | 9. |
*微步时的等效分辨率。
最小增量运动测试结论
- 线性电机级实现了1.5nm最小增量运动
- 在没有线性编码器的滚珠丝杠和伺服电机的情况下(图7),阶梯尺寸为50nm大约是每个步骤的不准确性未构成阶梯尺寸的大百分比的极限。而且,在该特定的测试用例中,定位阶段存在大约25nm的间隙。
- 将线性编码器添加到滚珠螺杆和伺服电机阶段,允许1.5nm的步长 - 与线性电机级相同。
- 该步进电机工作台能够获得大约250 nm的步长,而不会有显著的步长误差。较小的步骤是可识别的,但明显的步骤不准确。每一步开始时的振动是步进电机共振的结果。这种振动可以通过安装在舞台轴上的机械阻尼器或应用电子阻尼器来最小化,这两种方法在本研究中都没有使用。
短期稳定性(位置抖动)测试
测试四种不同的阶段配置以进行短期保持稳定性(位于位置抖动)。在通过使能测量之前,允许所有阶段配置在环境中平衡至少12小时。使用0%保持电流和20%保持电流测试步进电机配置。
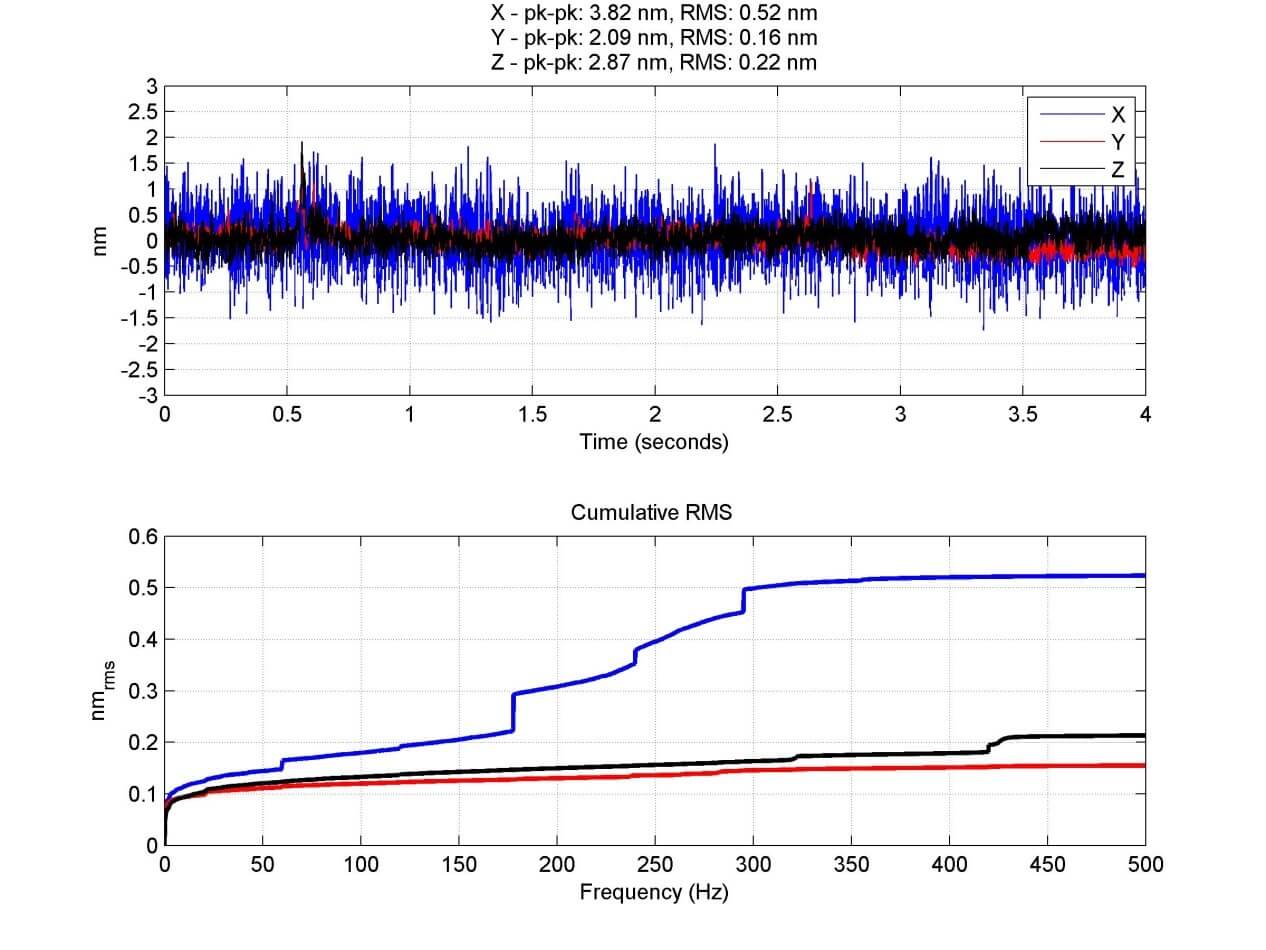
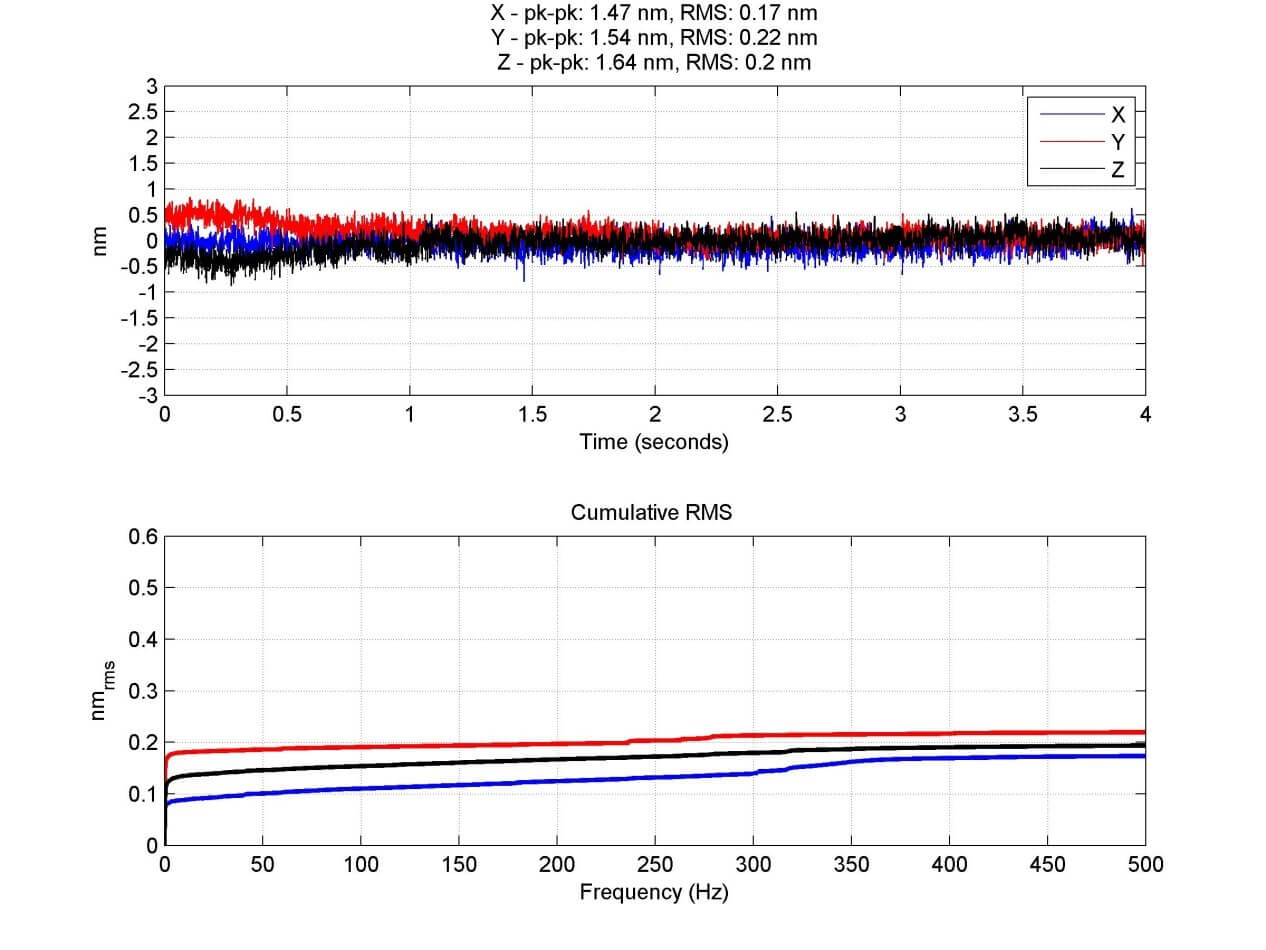
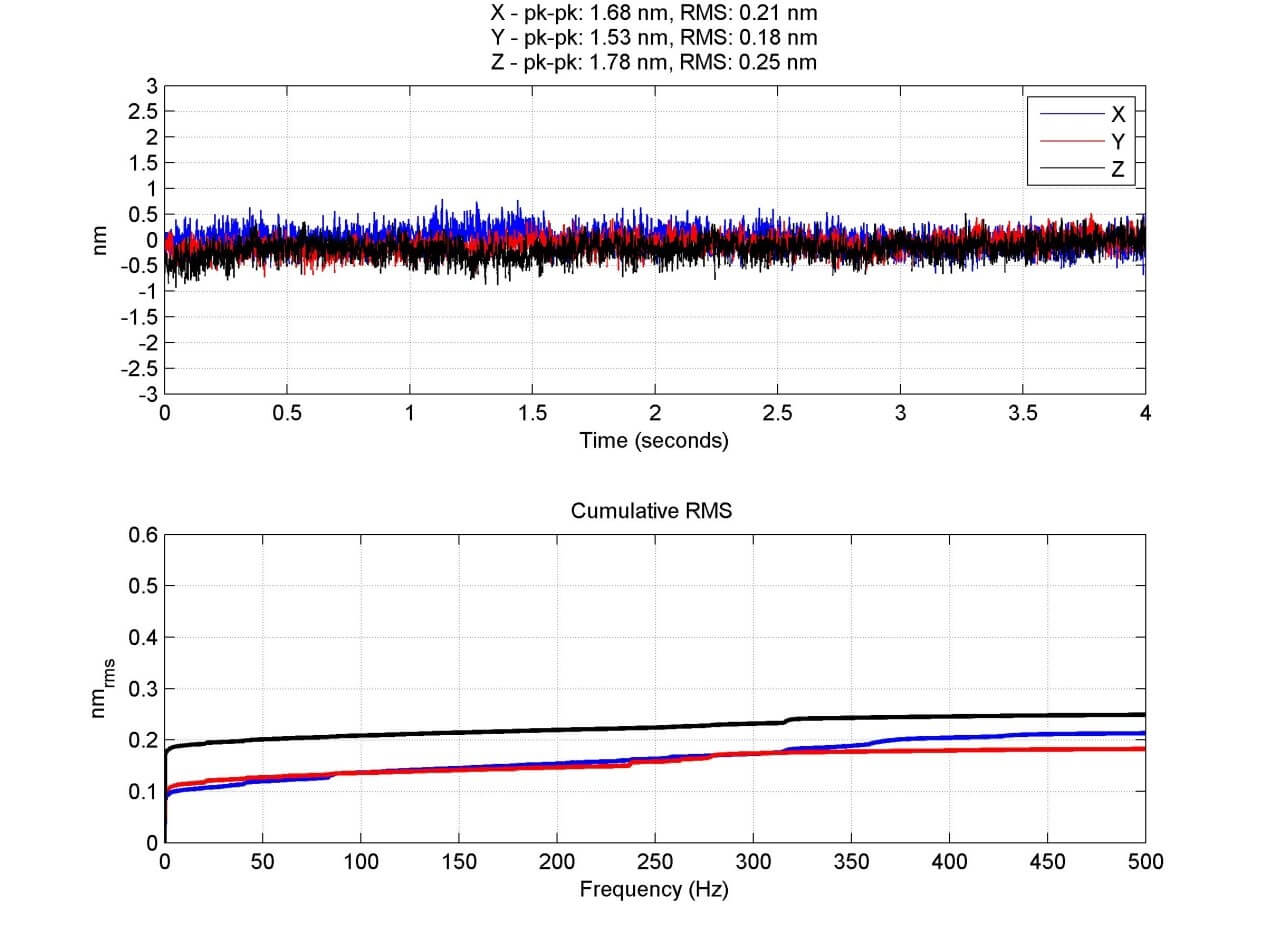
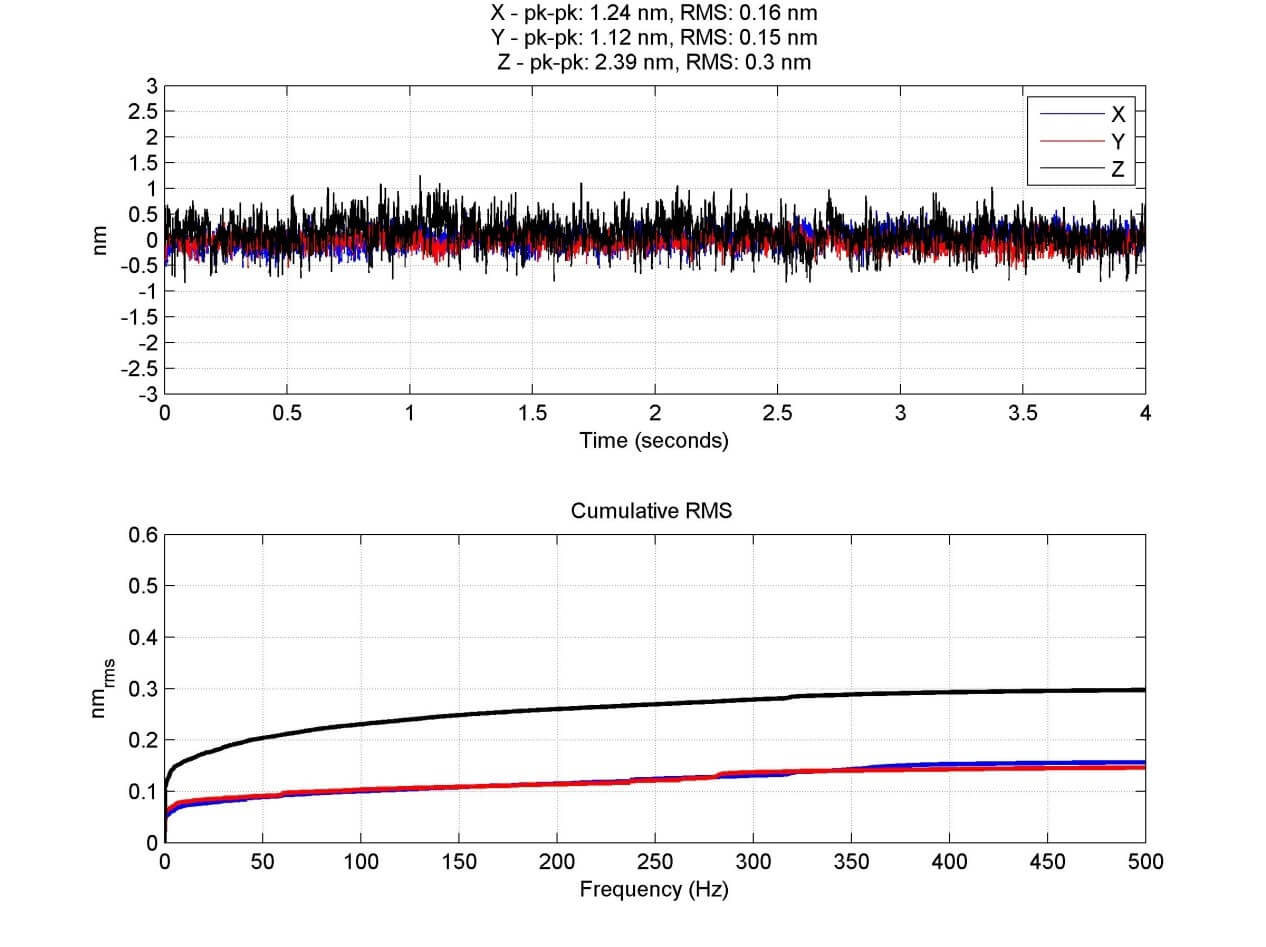
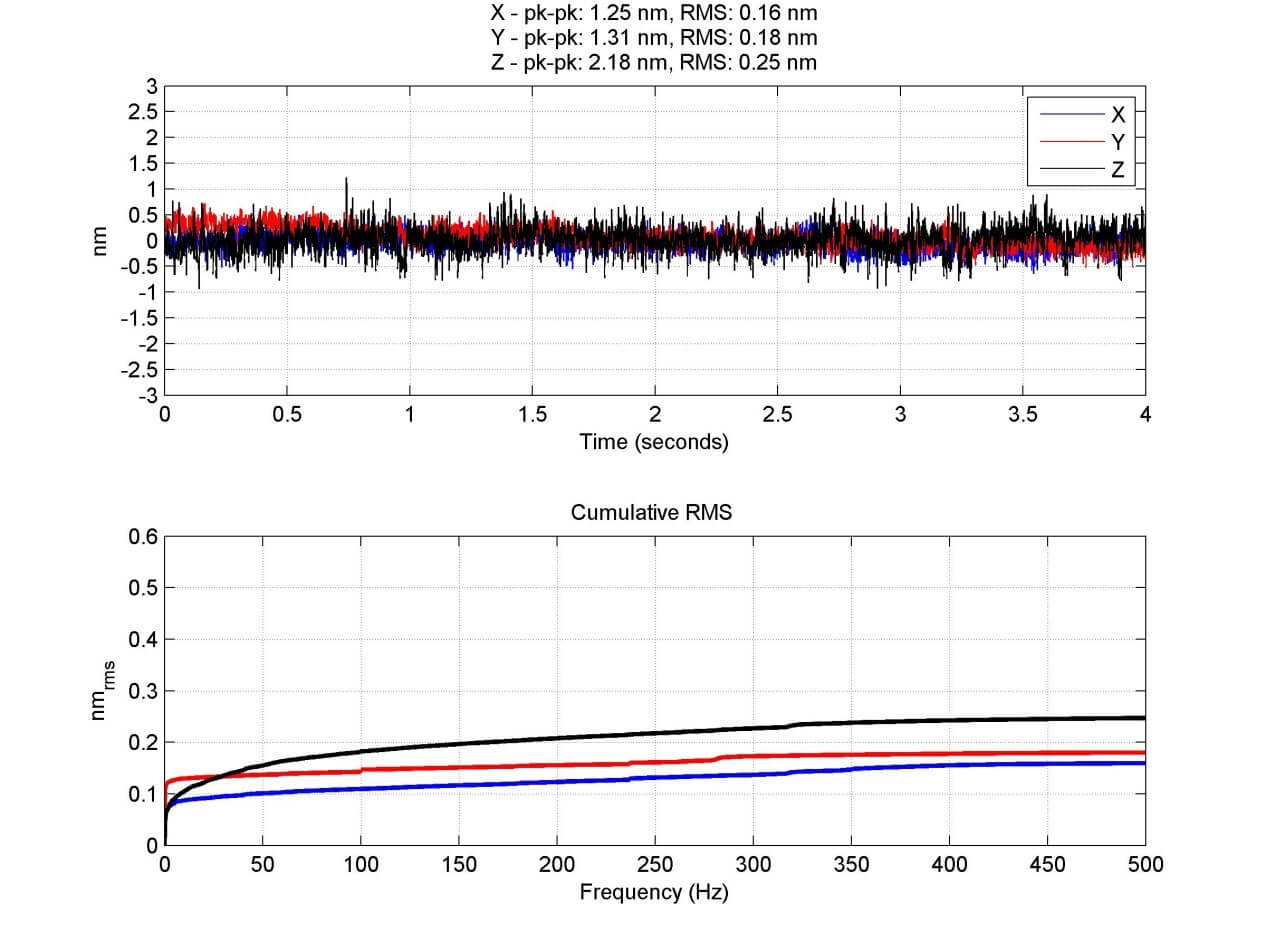
数据被捕获了四秒钟,并在500 Hz测量带宽处报出了RMS和PK-PK抖动值。阶段配置和结果如表4所示。图10-14显示了每个测试的位置抖动时间捕获和累积RMS抖动结果。
| 舞台类型和驱动器 | RMS(方向) | PK-PK(X方向) | RMS(上) | pk-pk(上) | rms(z方向) | pk-pk (z) | 数字数字 |
| 线性电机 | 0.52 nm. | 3.82纳米 | 0.16 nm. | 2.09 nm. | 0.22纳米 | 2.87纳米 | 10. |
| 滚珠丝杠和伺服电机,(无直线编码器) | 0.17纳米 | 1.47纳米 | 0.22纳米 | 1.54纳米 | 0.20 nm. | 1.64纳米 | 11. |
| 滚珠丝杠和伺服电机,(带线性编码器) | 0.21纳米 | 1.68 nm. | 0.18纳米 | 1.53 nm. | 0.25纳米 | 1.78纳米 | 12. |
| 滚珠丝杠和步进电机(0%保持电流) | 0.16 nm. | 1.24 nm. | 0.15纳米 | 1.12纳米 | 0.30纳米 | 2.39纳米 | 13. |
| 滚珠丝杠和步进电机(20%保持电流) | 0.16 nm. | 1.25纳米 | 0.18纳米 | 1.31纳米 | 0.25纳米 | 2.18纳米 | 14. |
短期稳定性试验结论
- 所有阶段配置在x,y和z方向上具有低于4nm pk-pk的抖动测量。
- 在这次试验中,螺杆驱动级的性能略好于直接驱动级。
- 应该指出的是,Aerotech建立了其他线性电机级和驱动器,使直接驱动电机抖动与螺杆系统的竞争对手的竞争力。
长期稳定性测试
四个不同的阶段配置进行了超过60分钟的长期保持稳定性测试。首先,我们进行了一个基线测试,在一整天的时间里,在电机开启的情况下,这个阶段被允许与环境保持平衡。测量X、Y和Z方向的位置稳定性,同时捕获测量装置和工作台各部分的温度。
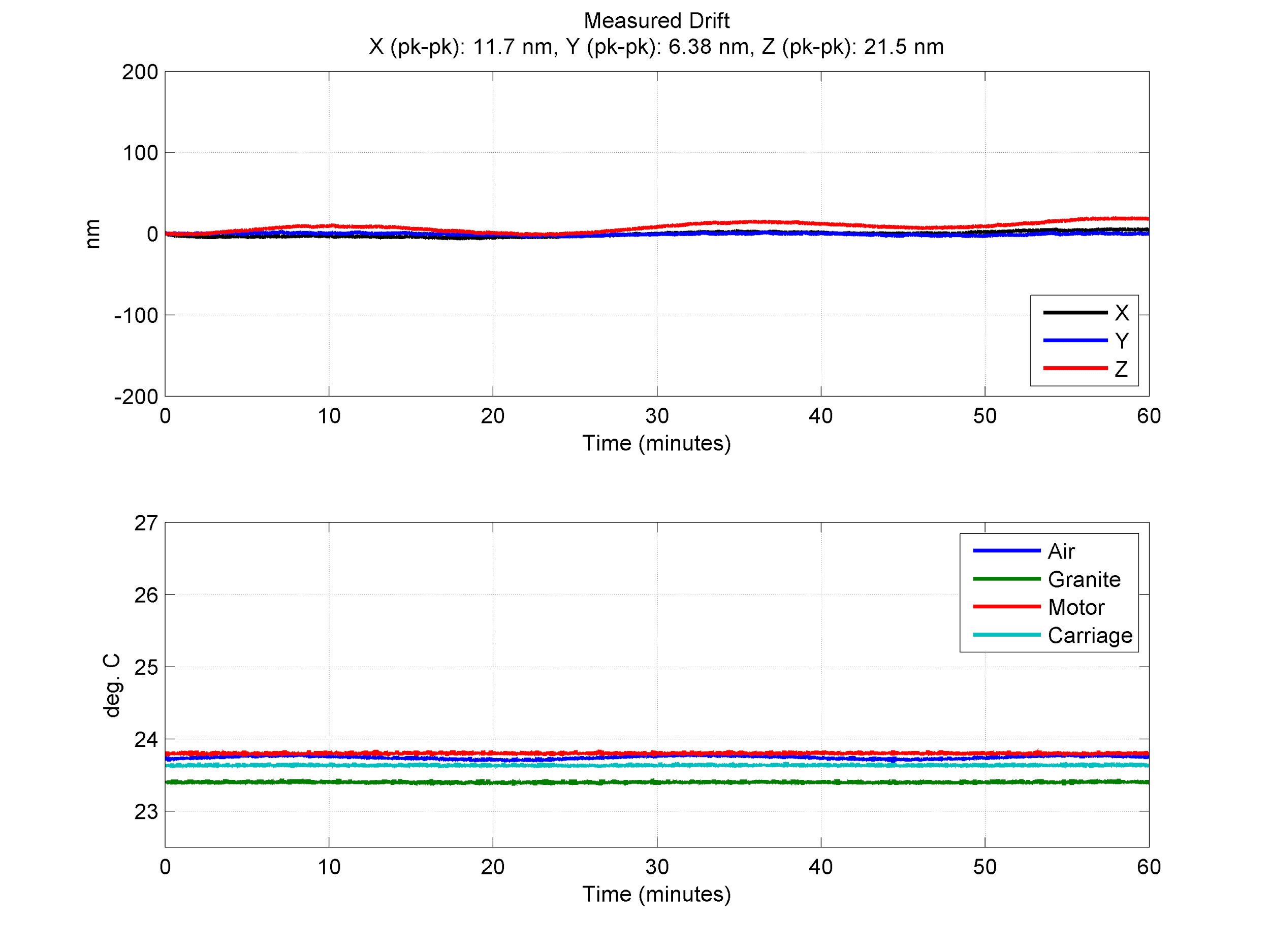
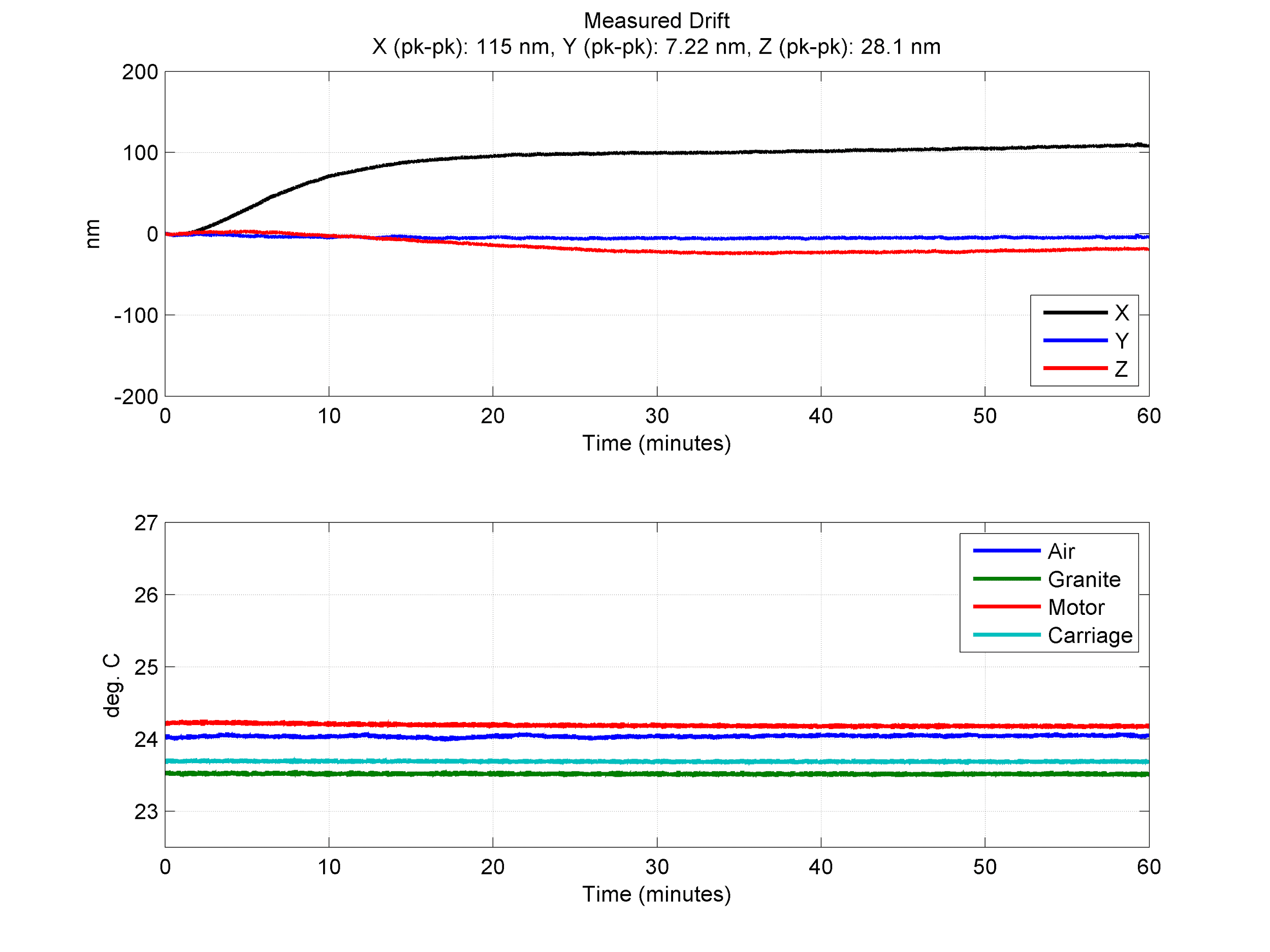
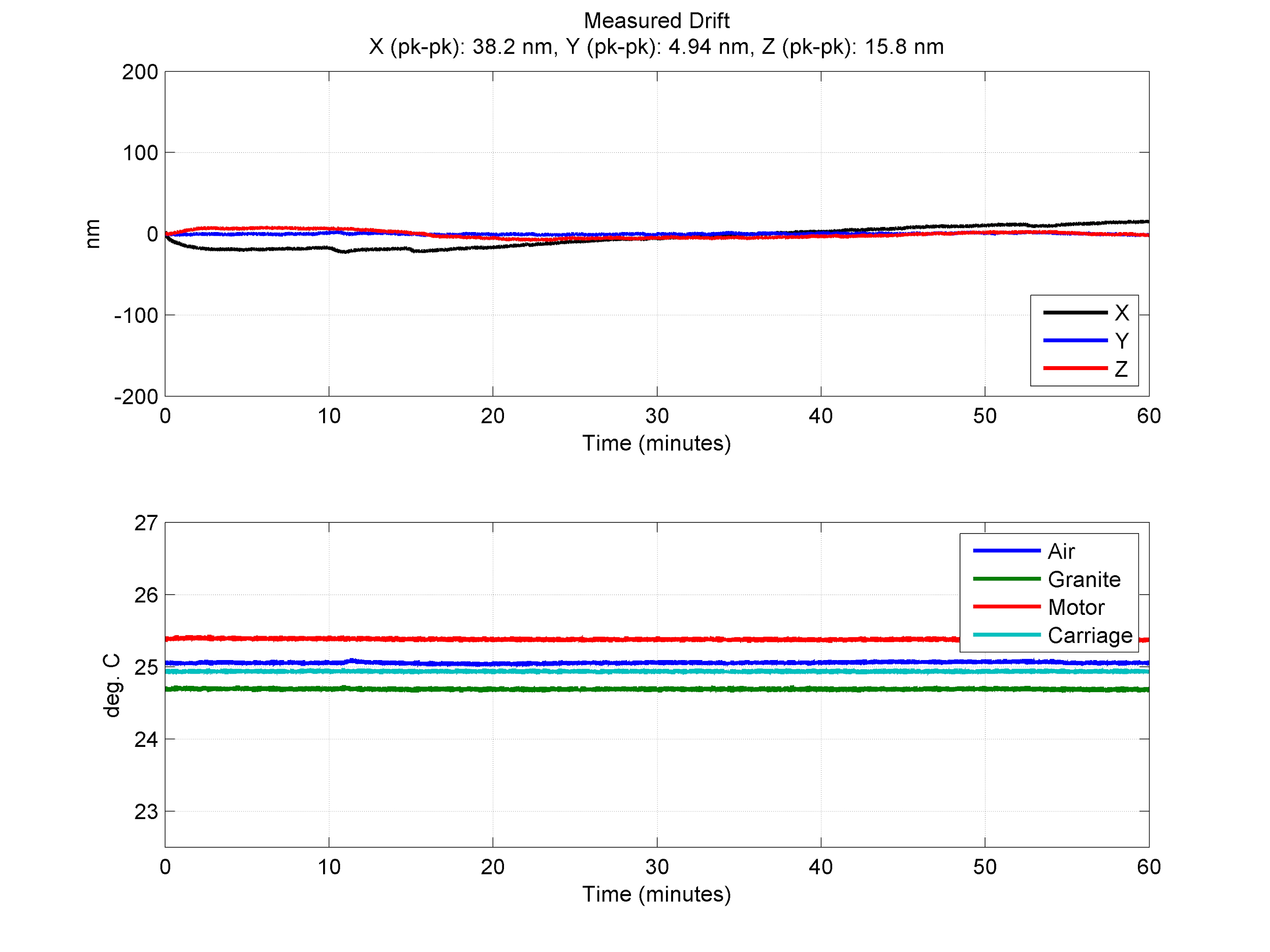
在长期基线测试后,各阶段以6mm /s和200mm /s2的加速/减速速率进行相对良性的50 mm来回移动,持续45秒。然后将工作台带入电容探头范围,并捕捉位置稳定性60分钟。该运动剖面测试的目的是在进行实验之前复制定位样本或梁线运动平台的运动。
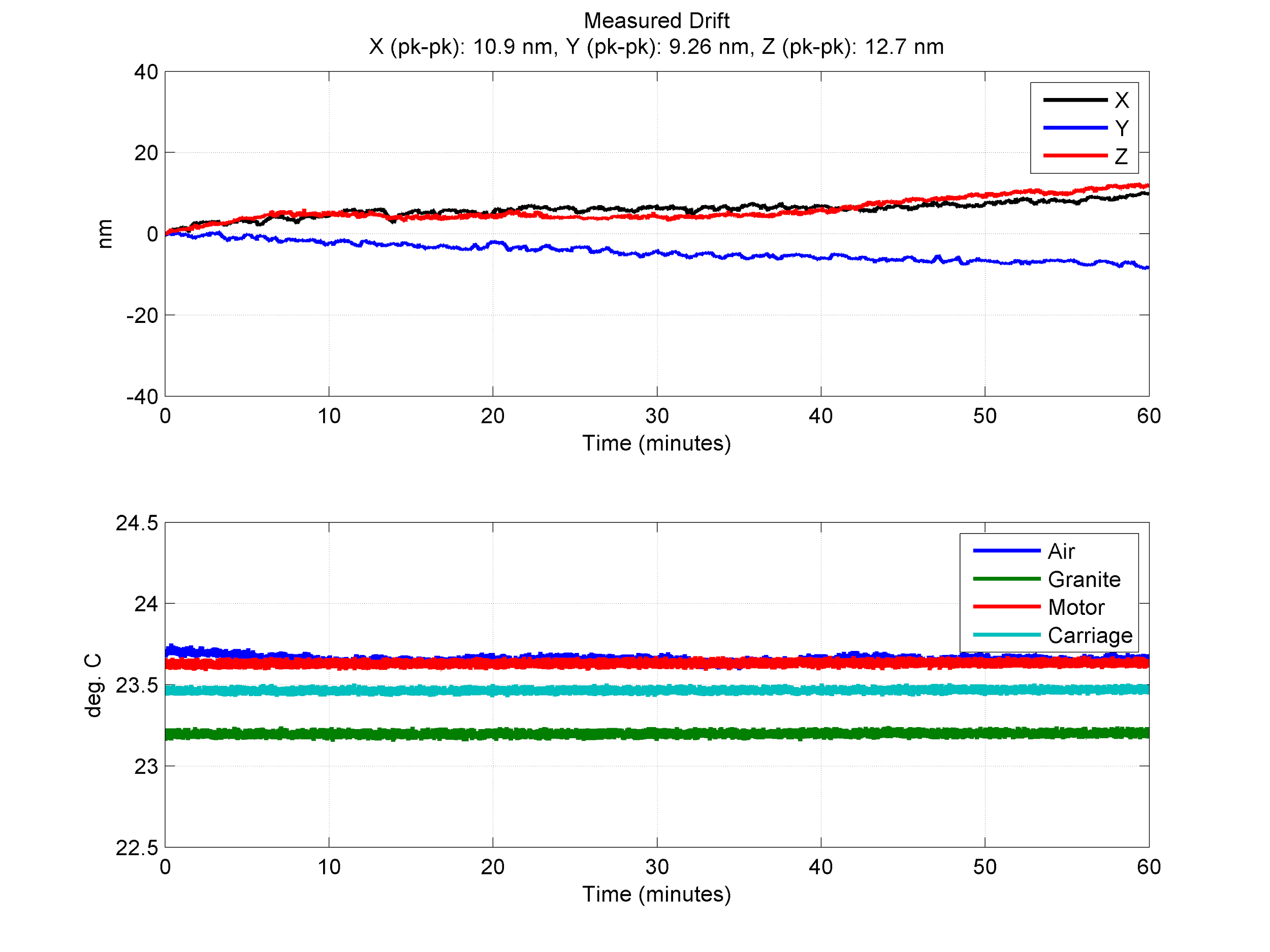
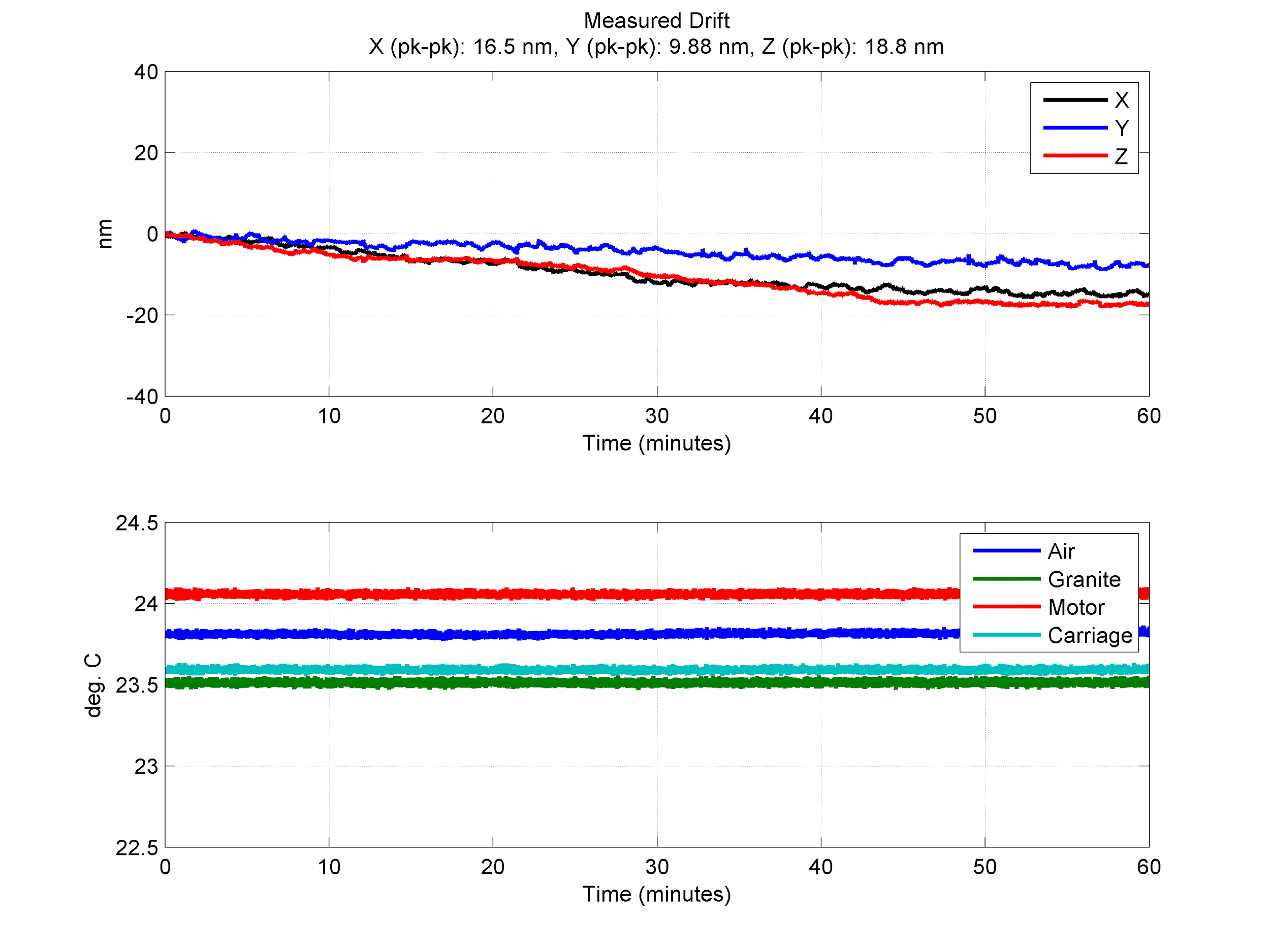
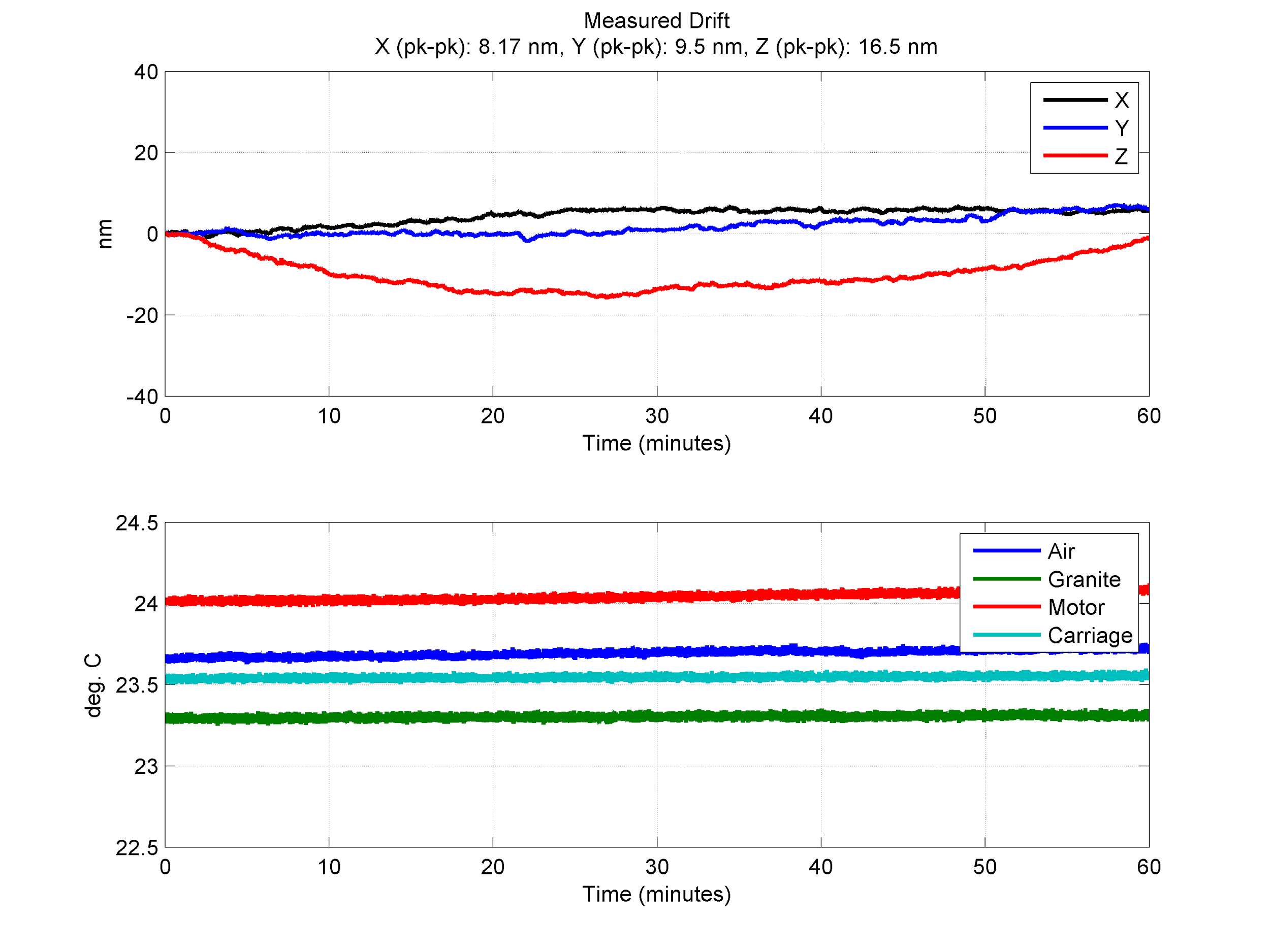
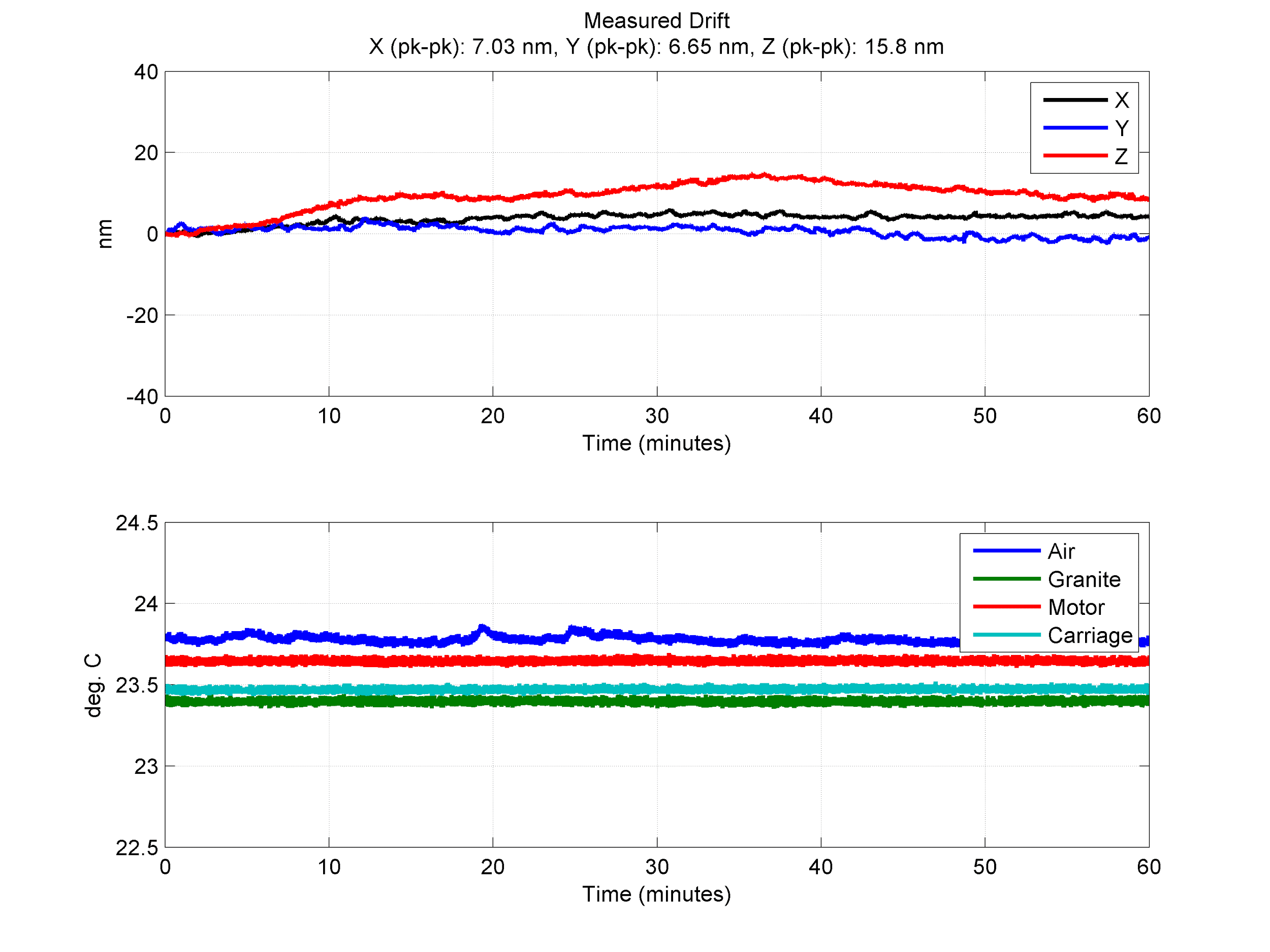
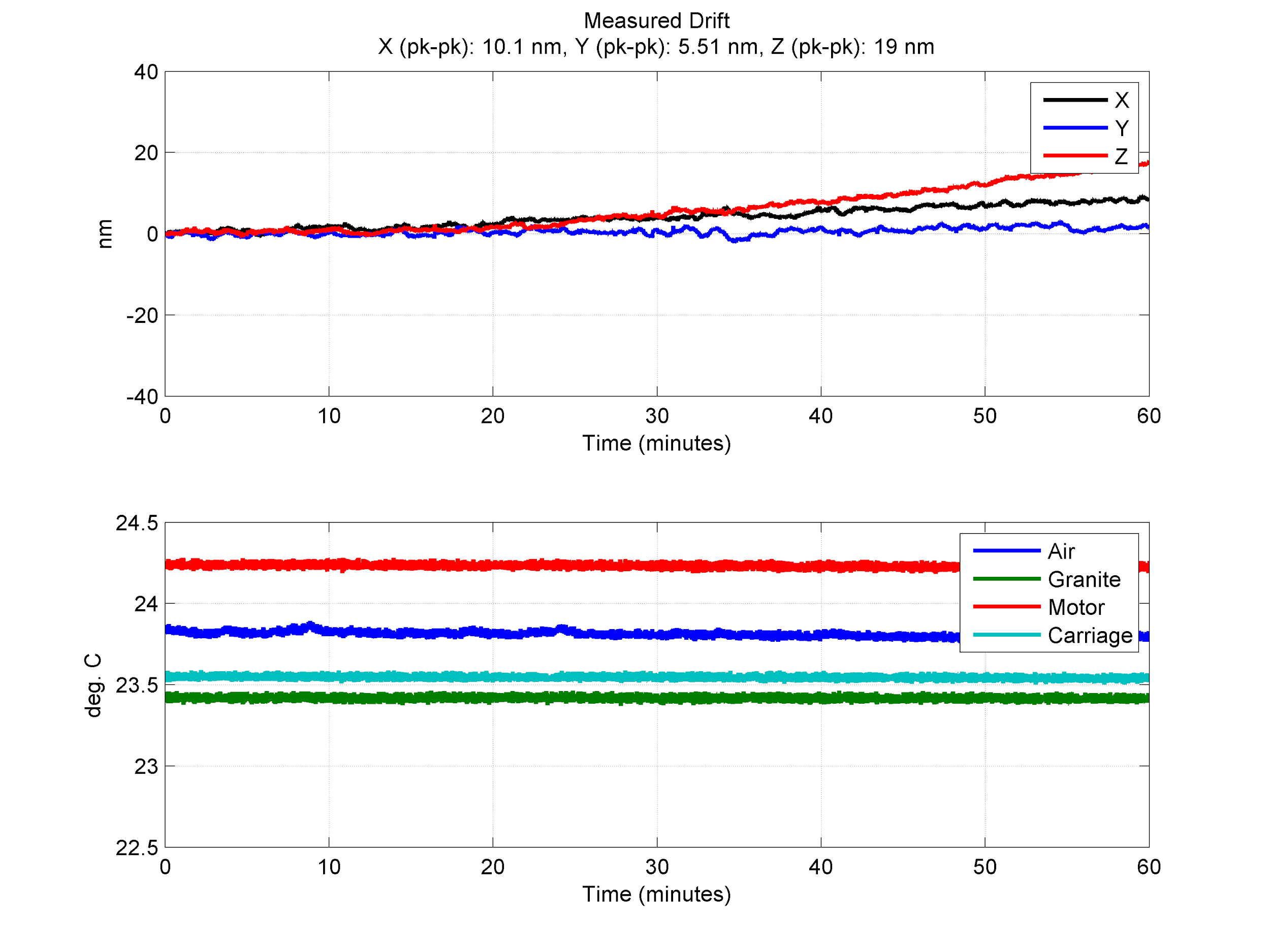
长期稳定性试验总结见表5。所有测试的漂移和温度数据如图15-22所示。
| 舞台类型和驱动器 | 在测试之前移动常规 | 稳定性(nm) | PK-PK Y稳定性(NM) | 稳定性(nm) | 数字数字 |
| 线性电机 | 没有 | 10.9纳米 | 9.3纳米 | 12.7纳米 | 15. |
| 滚珠丝杠和伺服电机(无直线编码器) | 没有 | 16.5纳米 | 9.9纳米 | 18.8 nm. | 16. |
| 滚珠丝杠和伺服电机(带线性编码器) | 没有 | 8.2nm. | 9.5纳米 | 16.5纳米 | 17. |
| 滚珠丝杠和步进电机(0%保持电流) | 没有 | 7.0纳米 | 6.7纳米 | 15.8 nm. | 18. |
| 滚珠丝杠和步进电机(20%保持电流) | 没有 | 10.1纳米 | 5.5纳米 | 19.0 nm. | 19. |
| 线性电机 | 是的 | 11.7 nm. | 6.4 nm. | 21.5纳米 | 20. |
| 滚珠丝杠和伺服电机(无直线编码器) | 是的 | 115海里 | 7.2纳米 | 28.1纳米 | 21. |
| 滚珠丝杠和伺服电机(带线性编码器) | 是的 | 38.2 nm. | 4.9纳米 | 15.8 nm. | 22. |
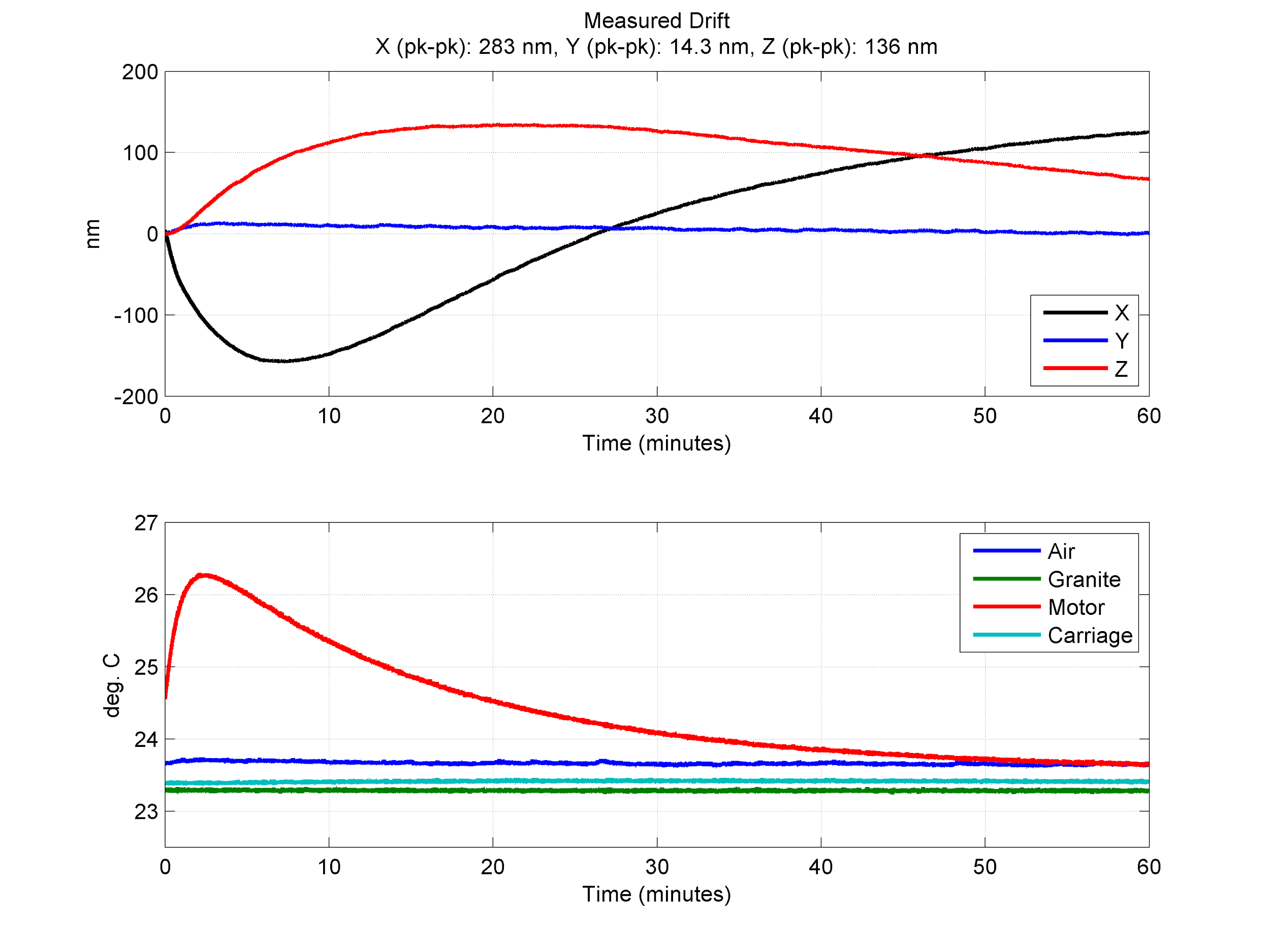
| 滚珠丝杠和步进电机(0%保持电流) | 是的 | 283海里 | 14.3纳米 | 136海里 | 23. |
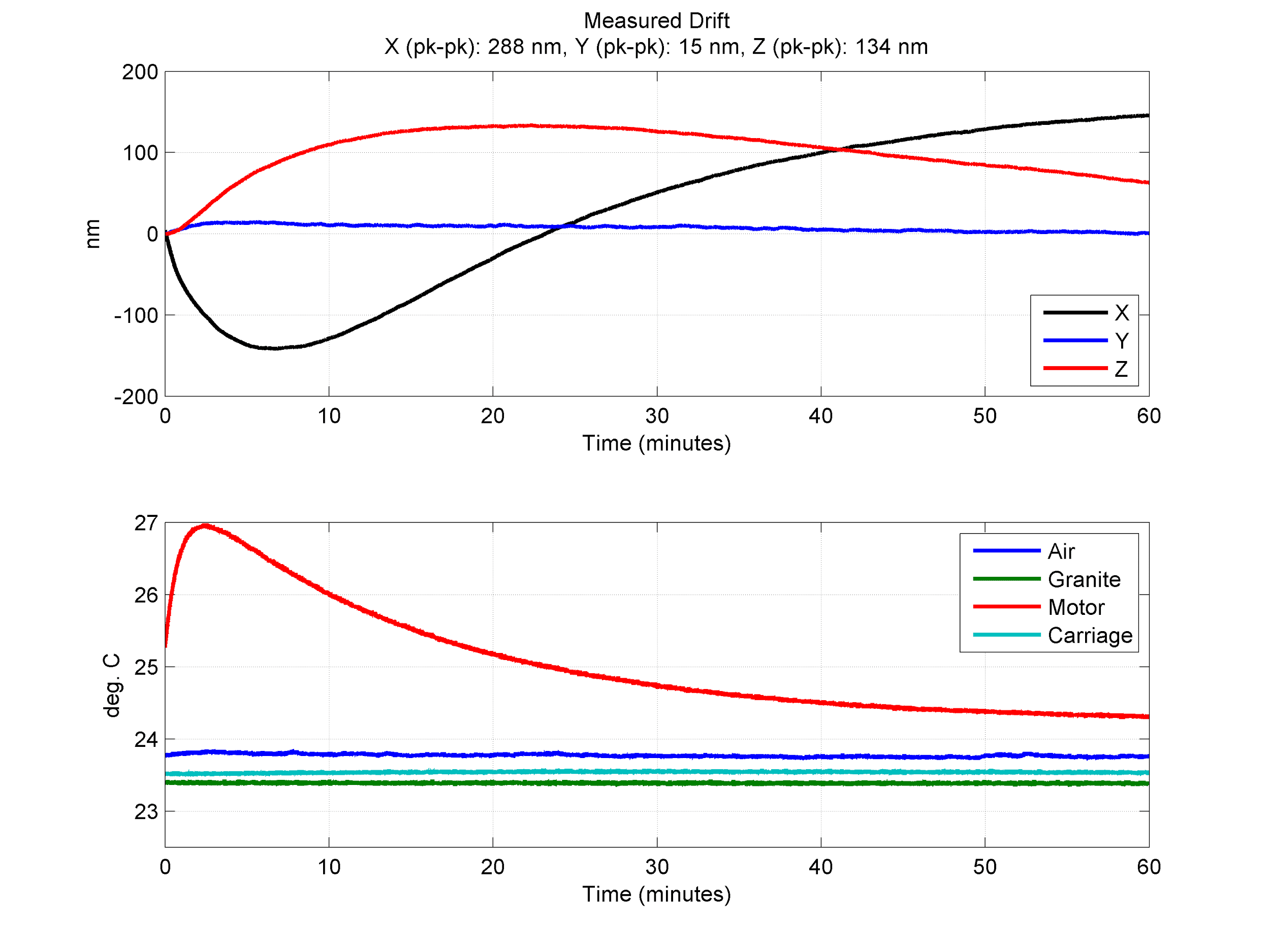
| 滚珠丝杠和步进电机(20%保持电流) | 是的 | 288海里 | 15.0 nm. | 134海里 | 24. |
长期稳定性试验结论
- 在基线长期稳定性测试中,所有阶段的表现相似(无移动例程)。在60分钟的测量时间内,由于室内温度的变化,测试之间测量的漂移差值(5- 10nm)在预期范围内。
- 当执行一个移动程序时,测量到的步进电机级在运动方向上的漂移是直线电机级的23倍,大约是带线性编码器的伺服电机的7倍。
- 对于滚珠丝杠/伺服电机和移动常规的测试箱,在X方向上观察到大约115nm的漂移,并且在阶段的测量点处的测量点最小的温度升高(电动机经历大约0.1°C)。该漂移的原因可能是由于滚珠丝杠中的加热和滞后,因为测量的位移在允许在允许平衡2-3小时后返回起始位置。
- 正如预期的那样,线性编码器(直接反馈)有助于显著减少运动方向的漂移。
结论
在需要最高水平的位置抖动(短期稳定性)的应用中,具有线性放大器的球螺旋驱动级最佳。直接驱动线性电机级竞争对手滚珠驱动的阶段,其位于位置抖动略微较差(与〜2nm PK-PK相比〜4nm)。Aerotech在1-2nm范围内具有标准的线性电机级设计,位于位置抖动值。
直接驱动直线电机级显著优于螺杆驱动级的地方在于它们能够进行小的机械运动(最小的增量运动),并在较长的时间内保持良好的保持稳定性。在滚珠丝杠伺服电机平台上增加线性编码器可以改善两者;然而,运动的速度和流畅性通常会受到影响。例如,许多新的x射线成像应用需要更亮的x射线(更高的亮度)。如果不能快速成像,这些更明亮的x射线可能会损坏样本。由于这个原因,许多应用程序正在转向扫描,而不再采用分步测量-分步测量方法。由于非接触式驱动机制,直接驱动级天生更适合这些扫描应用。
虽然步进电机阶段是一种成本效益和简单的执行定位方式,但它们遭受了一个主要的缺点 - 热量。坐在休息时,将电流降低到较低水平(有时0%保持电流)是非常常见的。但是,如本测试所示,即使是45秒的步进电机级运动也会导致几度温度升高,这将导致数百纳米漂移并采用>> 1小时以平衡。自真空中的应用通常会加剧这种漂移,因为热管理变得更加困难。伺服电动机阶段具有固有的优点,因为它们仅在需要时使用电流。这有效地最小化了加热和热漂移效果,并允许更稳定的定位系统。
随着对图像样本分辨率越来越高的追求,定位系统将在实现这些高质量图像方面发挥越来越大的作用。这种极其精细的定位和稳定性的能力,使线性和旋转伺服电机成为实现亚微米甚至纳米样品和光学定位的应用的优秀选择。
附录
附录A:最小增量运动测试图

附录B:短期稳定性试验区
附录C:长期稳定性试验区