3D计量系统,应用笔记,数据存储,集成自动化系统,运动控制平台,光学和光子,压电纳米定位器,精密制造,科学研究机构,半导体,阶段和执行器,测试和检查亚博微信vip群
应用笔记
亚博微信vip群具有精密非接触式位移传感器的运动控制
介绍
非接触式位移传感器用于测量应用,曲面或过程不允许接触和需要高精度。电容性,共聚焦,涡流和激光三角测量传感器已证明自己在包含运动系统的应用中。非接触式传感器可在许多不同的版本中提供。然而,随着所需的精度增加,传感器范围显着降低。
尽管范围限制,但市场上还有许多产品,可以选择适当的传感器进行某些应用。以下内容简要解释了每个位移传感器技术,以帮助简化您的选择。
请注意,不仅传感器本身负责实现的精度,而是电子设备,信号处理和环境条件的组合。
涡流测量原理
严格来说,涡流原理应被归类为归纳测量原理。通过涡流测量基于从振荡电路提取能量。在导电材料中诱导涡流的诱导需要这种能量。这里,将线圈提供交流电,由此围绕线圈形成的磁场。
根据法拉第的诱导定律,如果在该磁场中存在导电物体,则在其中产生涡流。根据Lenz规则,这些涡流的领域与线圈的领域相反,这导致线圈阻抗的变化。阻抗的这种变化可以作为绝对距离输出。
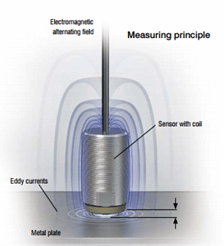
涡流传感器可用于具有铁磁和非铁磁特征的所有导电物体,并且可用于“通过”非导电物体。它们通常具有小的传感器尺寸。涡流传感器通常用于存在恶劣环境条件的应用中,并且需要“介质”精度。污垢,压力和极端温度的免疫是关键性能特征,使其适用于运动系统在激光加工环境中使用传感器来聚焦高度调节的应用的应用。输出信号和线性度取决于目标材料的电气和磁特性,因此需要校准传感器以进行测试的材料。传感器直径和有效的测量光斑直径随着较大测量范围的增加而增加。然而,这可以用来平均地用更大的光斑尺寸的表面。
电容式测量原理
电容式测量原理基于理想的板式电容器如何运行。如果恒定频率的交流流过传感器电容器,则传感器上的交流电压的幅度与到目标(接地电极)的距离成比例。在实践中,由于传感器的设计作为保护环电容器,实现了几乎理想的线性特性。电容传感器还可以测量绝缘材料。
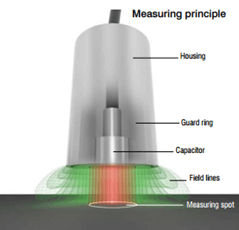
电容传感器的优点包括所有导电物体的恒定灵敏度和线性度。它们还具有高温和信号稳定性。电容传感器具有良好的线性度的亚域分辨率。电容式传感器非常适用于相对清洁的环境中的大型平面,因此应避免在测量区域中产生羽流的激光应用。
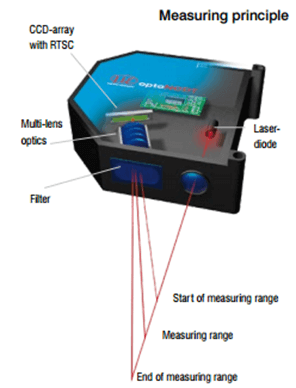
激光三角测量原理
激光三角测量发射瞄准目标的激光束。从目标反射的光点通过透镜在CCD / CMOS阵列上或PSD元件上成像。反射光束的强度取决于材料的表面。从接收器元件上的光点的位置计算从物体到传感器的距离。数据在内部控制器中进行评估并通过各种接口输出。
激光三角测量装置的优点是测量光斑直径小,测量物体和传感器之间的大偏移距离,大量测量范围,它几乎独立于材料类型。然而,测量精度受到闪亮和遮罩表面的影响,光束路径必须是无任何障碍物的清洁环境。此外,激光三角测量有与共聚焦,电容和涡流传感器相关的大传感器尺寸,并且对于反射表面需要特殊的传感器对准。高度复杂的表面可能会扰乱光束返回传感器,导致数据中断。
通过考虑到这些限制,激光三角测量可以提供低成本,扫描表面的快速扫描。但是,激光三角测量不适合在碎片可以进入光束路径的地方。
共聚焦色敏测量原理
从控制器中的光源开始的多色光(白光)通过光纤传输到传感器。透镜被布置成使得光轴的纵向方向上的光被控制的色差被分解为单色波长。镜头将光聚焦到目标表面上。根据距离,在焦点中存在特定的光谱颜色(波长)。在传感器系统中,使用精确聚焦在目标上的光的波长用于测量。从该点反射的光通过光学布置对光敏感传感器元件进行成像,其中检测和评估相关的光谱颜色。通过工厂校准将定义的距离点分配给每个波长。
该原理在实际上可以测量所有表面,包括透明或半透明。共聚焦传感器的优点是纳米范围的极高分辨率;无关的测量;一个小,恒定的测量点;和一个紧凑的光束路径。限制将是传感器和测量对象之间的距离相对有限,光束路径和成本中所需的清洁环境通常比此处讨论的其他技术更昂贵。

共聚焦测量倾向于提供最新的电子产品,包括高速触发和记录输入,多个编码器输入和各种以太网连接,如EtherCAT。
使用具有高级运动控制器功能的位移传感器亚博微信vip群
自动对焦 - 垂直高度控制
亚博微信vip群运动控制器,如aerotech独奏者那合奏, 和自动化3200(A3200)具有能够启用与伺服或步进电机配合使用的外部跟踪环路。位移传感器可以用作反馈设备。通常,这用于控制系统内的垂直高度。传感器的模拟输出电压用作反馈,并直接进入运动控制器模拟输入。亚博微信vip群自动对焦反馈循环使用简化的PID环路,该循环可以设置为连续地从表面保持高度 - 例如,聚焦摄像机或激光,或用于到达目标位置。也可以应用死区,使轴不会连续捕猎。
通过设置我们的加速度限制特征,可以限制轴中的突然加速度,因此可以减少或消除由启用自动聚焦引起的位置命令的突然变化。以相同的方式可以通过速度钳位值指定最大跟踪速度。可以设定跟踪范围的上限和下限,使得可以考虑孔和边缘区域以使轴从高度的大波动停止。
位置同步输出(PSO)
Aerotech控制器有能力占用三个编码器输入,并将其组合以创建一个至三维路径跟踪能力。在该路径中,控制器可以输出高精度同步脉冲生成功能,称为PSO(位置同步输出)。这通常用于调制激光功率,触发外部硬件设备或同步传感器输入上的数据捕获。PSO具有低抖动和低延迟规范,因为它在硬件而不是软件中进行。
PSO由两个主要功能块:距离计数器和脉冲发生器组成。距离计数器在旅行指定距离后生成“射击事件”。该事件可以直接进入传感器电子设备,以便可以记录位移数据。距离可以固定或包含在驱动阵列中。因此,这可以用于建立表面的连续数据或专注于被测部分的特定特征。
由于PSO数据可以是一维的,因此可以通过大多数Aerotech的运动控制器硬件等扫描等简单线路扫描。亚博微信vip群可以通过具有双PSO能力的设备执行二维XY零件数据捕获,并且可以通过三重PSO功能获得更复杂的3D空间或螺旋路径。
Dataacq(A3200)和Poscap(集合/独奏者) - 数据采集
集合/独奏者的A3200或POSCAP上的DataACQ命令可以与PSO功能结合使用,以记录运动控制器上的数据,而不是直接在传感器电子设备上存储数据。亚博微信vip群这通常是可以在发生PSO发射事件时捕获的模拟值。在共聚焦传感器的情况下,模拟数据可以是强度而不是距离,其可用于确定传感器下方的部分的其他特征。
以反向方式,所生成的外部源或其他事件可以使用其高速输入在运动控制器上开始数据记录事件。亚博微信vip群同样,可以记录位移或强度,或者来自各种编码器输入的位置。
使用传感器输出的位置反馈
传感器电子器件的模拟输出的另一个使用可以是非传统形式的位置反馈。与保留正常反馈装置的自动对焦方法不同,运动控制器可以与另一个设备(速度环)或唯一反馈结合使用的绝对主反馈或作为唯一反馈指定传感器电子设备的模拟输出。亚博微信vip群这可能是有用的,在模拟传感器在相对短的距离上用作高分辨率反馈装置,通过使用传感器类型,其中传统电动机编码器不适合或者传感器不能位于测量区域中。
编码器反馈进入传感器电子设备
可以将最多三个单独的增量编码器的数据直接捕获到传感器电子设备中。这允许编码器数据与位移同步,并且在适用的强度数据中同步。控制器可以直接回显连接的数据,也可以将(具有适当的硬件)非增量编码器类型转换为增量格式。
Ethercat /以太网捕获
诸如PSO的触发事件可用于通过标准TCP / IP通过传感器电子设备启动被捕获和释放的数据。可以使用触发方法克服以太网的非确定性/实时性质。亚博微信vip群然后,运动控制器可以通过标准TCP / IP连接访问数据。如果需要实时以太网数据,则可以调查EtherCAT的使用。触发事件可以通过EtherCAT或者可以通过EtherCAT网络访问传感器电子设备上的数据。A3200控制器可选择充当EtherCAT主设备,并使用XML文件中呈现的数据与传感器相关联。
LabVIEW®/ .NET /MATLAB®
Aerotech运亚博微信vip群动控制器有库和LabVIEW VI(虚拟仪器) - 与传感器制造商相同的相同 - 可以创建强大的前端和分析软件。
Aerotech希望认识到Micro Epsilon UK在创建上面包括图像的信息时提供的专业知识和援助。Micro Epsilon是制造非接触式位移传感器的世界领导者。